






ШИМ в дизайне источников питания

At a Glance
Сигналы ШИМ используются для управления средней мощностью в цепях коммутационных регуляторов.







Как следует из названия, импульсные источники питания используют полупроводниковый переключатель (обычно MOSFET) для управления магнитным компонентом, обычно трансформатором или индуктором. Выходная мощность переключаемой цепи затем выпрямляется и регулируется для обеспечения постоянного выходного напряжения. Импульсные источники питания популярны благодаря их значительно более высокой эффективности по сравнению с неимпульсными альтернативами, такими как линейные регуляторы. В этой статье мы рассмотрим, что такое управление ШИМ и как его использовать.
Что такое ШИМ
Широтно-импульсная модуляция (ШИМ), также известная как модуляция длительности импульсов (МДИ), - это техника для снижения средней мощности в переменном токе (AC) сигнала. Смысл ШИМ заключается в эффективном отсечении частей волновой формы для снижения среднего напряжения без влияния на базовую частоту сигнала. Увеличение периода, когда напряжение "выключено", снижает среднее напряжение, а следовательно, и мощность.
Когда ШИМ применяется в источнике питания или регуляторе мощности, ШИМ используется для поддержания либо:
- Постоянного тока при изменяющемся напряжении (управление по току)
- Постоянного напряжения при изменяющемся токе (управление по напряжению)
Более подробно это обсуждается ниже. Если мы посмотрим на временной график сигнала ШИМ, он будет выглядеть как график на следующем изображении.
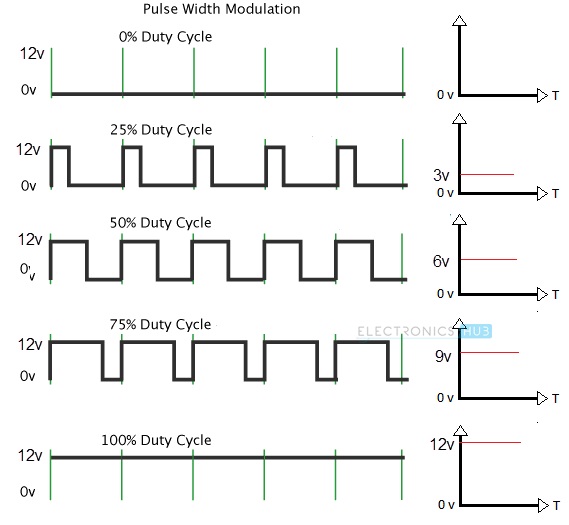
Источник изображения: ElectronicsHub
Использование управления выходом ШИМ
Импульсные источники питания должны реализовывать контур обратной связи для поддержания контроля напряжения выхода ШИМ в требуемых пределах при изменении условий нагрузки — выходное напряжение источника питания возвращается через усилитель ошибки для предоставления управляющего сигнала. Наиболее распространенным методом управления является использование ШИМ. Ширина импульса переменного тока на входе источника питания регулируется для увеличения или уменьшения электрической энергии, что, в свою очередь, приводит к изменению напряжения на выходе источника питания. Например, увеличение ширины входного импульса приводит к повышению выходного напряжения, уменьшение ширины импульса снижает контроль выходного напряжения ШИМ. Этот механизм обеспечивает замкнутый контур обратной связи для контроля выходного напряжения.
Одна из проблем, о которой следует помнить, заключается в том, что типичная форма сигнала переменного тока, как правило, имеет доброкачественные нарастающие и спадающие фронты. Нарастающие и спадающие фронты могут стать более резкими при применении управления питанием с использованием широтно-импульсной модуляции (PWM), особенно при меньшем коэффициенте заполнения. Внезапные изменения напряжения могут генерировать переходные процессы, способствуя электромагнитным помехам и вызывая большие пусковые токи в схеме PWM. Также, незначительные ошибки в управляющей схеме могут быть усилены до значительных ошибок на выходе, потенциально приводя к нестабильному выходному напряжению. Стандартное решение заключается в избежании резкого включения-выключения входного сигнала и, вместо этого, ограничении скорости изменения с использованием техники компенсации наклона.
Техники управления с контролем по пиковому току (PCMC) предлагают простое решение для схемы питания с широтно-импульсной модуляцией (PWM), за исключением преобразователей индуктор-индуктор-конденсатор (LLC), которые требуют управления по напряжению. Управление мощностью с использованием PWM всегда будет представлять собой вызов, когда коэффициент заполнения приближается к своему максимальному значению. Разработка схемы PWM с целью избежания этой ситуации всегда предпочтительнее добавления дополнительной управляющей схемы для применения компенсации наклона для предотвращения нестабильности на выходе.
Рассмотрение конструкции
Переходные пусковые токи
Одним из недостатков импульсных источников питания, особенно при использовании в изолированных блоках питания, является то, что при включении может возникать значительный переходный ток из-за возбуждения индуктивных элементов блока питания. Кроме того, начальный ток непредсказуем; он будет меняться в зависимости от точки в цикле переменного тока, когда индуктивные элементы впервые возбуждаются.
Переходный процесс можно легко предсказать в симуляции SPICE. Не всегда необходима точная модель регулятора, достаточно сигнала ШИМ, который управляет полевыми транзисторами и имитирует время нарастания/спада реального сигнала ШИМ в устройстве. Это дает достаточно точные результаты для драйверов затворов, используемых для управления внешними полевыми транзисторами, например, в H-мосту. Пример ниже показывает случай, когда пассивные элементы в понижающем преобразователе имеют недостаточное эквивалентное последовательное сопротивление (ESR), что приводит к недостаточно затухающему отклику, характерному для LC-цепи в течение первых 500 мс после включения.

Цепи управления на основе ШИМ могут реализовывать функцию плавного пуска, которая может контролировать начальную фазу включения питания для ограничения доступной энергии для цепи ШИМ и ограничения тока возбуждения до тех пор, пока источник питания не достигнет устойчивого состояния. По сути, это создаст затухающее включение, так что вышеупомянутые колебания не произойдут. Ограничение начального скачка тока защищает компоненты и может снизить эмиссии, связанные с переходными токами.
Многие интегральные схемы регуляторов мощности будут включать эту функцию, которая будет доступна через вывод на устройстве. Примером может служить LTM8052 от Analog Devices; время плавного пуска на этом устройстве программируется подключением конденсатора к выводу SS.

Защита от перегрузки по току
Преимущество управления ШИМ заключается в том, что логика измерения тока может использоваться для отключения источника питания путем выключения ШИМ, если выходной ток превышает определенный предел. Это предлагает простой в реализации механизм защиты от перегрузки по току, который автоматически сбрасывается, когда ток возвращается в свои пределы.
Управление низкими нагрузками с помощью модуляции частоты импульсов
Одним из основных недостатков схемы источника питания с широтно-импульсной модуляцией (PWM) является её врожденная неэффективность при очень низких нагрузках. В условиях отсутствия нагрузки источник питания будет продолжать нести потери из-за схемы управления питанием. Это может быть проблемой для устройств на батарейках, которые работают долгое время в режиме ожидания, где эффективность источника питания определяет срок службы батареи.
Решением этой проблемы может быть использование модуляции частоты импульсов (PFM) вместо схемы источника питания PWM. Здесь рабочий цикл переменного тока остается неизменным, а управление выходной мощностью источника питания осуществляется за счет изменения частоты входного переменного тока.
Основная проблема с PFM заключается в том, что проектирование фильтрации шума становится гораздо более сложным из-за генерации шума в гораздо более широком диапазоне частот.
Другие проблемы заключаются в том, что управление PFM будет генерировать значительно большее колебание выходного напряжения, чем управление PWM, и что время переходного процесса может быть значительно дольше. Эти проблемы усложняют задачу для дизайнера, если источник питания управляет компонентами, чувствительными к колебаниям напряжения, особенно интегральными схемами.
Микросхемы питания теперь доступны с встроенными двухрежимными схемами ШИМ (PWM) и управлением PFM, которые автоматически переключаются в зависимости от нагрузки на выходе. Таким образом, ограничение управления PFM условиями низкой нагрузки, по определению, минимизирует влияние негативных эффектов, таких как излучаемый шум и пульсации напряжения.
Управление низкими нагрузками с помощью модуляции с пропуском импульсов
Другой техникой управления условиями низкой нагрузки является отключение ШИМ-сигнала на короткий период и полагание на выходной конденсатор источника питания для поддержания выходного напряжения в течение этого периода. Этот процесс отключения ШИМ-сигнала известен как пропуск импульсов или модуляция с пропуском импульсов (PSM). При отсутствии нагрузки ШИМ-сигнал потребуется только периодическое включение на короткие периоды для компенсации потерь в самом источнике питания, которые разряжают выходной конденсатор.
Пример, показывающий формы сигналов в регуляторе мощности, способном к PSM, приведен ниже. Функция PSM устраняет импульс ШИМ на затворах FET в условиях, определенных внутренней схемой контроллера. Пример ниже взят из TPS61175 от Texas Instruments.

Заключение
Основным преимуществом использования схем ШИМ является очень низкие потери мощности благодаря их высокой эффективности, используя очень высокие частоты для оптимального проектирования схемы. Это также относительно дешево в реализации по сравнению с аналогичными методами проектирования источников питания, с возможностью обработки высоких нагрузок. Основным недостатком является дополнительная сложность, требуемая для управления низкими нагрузками. Однако наличие интегрированных устройств, сочетающих управление ШИМ с автоматическим управлением низкими нагрузками, упростило эту задачу для разработчика источников питания.
Хотели бы вы узнать больше о том, как Altium Designer может помочь вам с вашим следующим проектом печатной платы? Обратитесь к эксперту в Altium.
Об авторе
Related Technical Documentation
Связанные ресурсы
Оглавление
От проектирования до выпуска — без лишних сложностей
- Привязывайте проверки к правильной версии
- Снижайте путаницу при передаче и объем доработок
- Раньше выявляйте риски, связанные с поставками и выпуском
- Работайте самостоятельно, делитесь при необходимости
Начать
Thank you, you are now subscribed to updates.

