








Применение гибких и жестко-гибких печатных плат

At a Glance
Существует множество увлекательных и интересных применений жестко-гибких печатных плат. Узнайте больше об этих важных областях применения и о том, как гибкие конструкции могут решить множество практических проблем.







Существует две основные причины для проектирования гибкой печатной платы в ваш продукт: создание компактного и эффективно собранного устройства или интеграция схемы в механическую функцию продукта динамическим образом. Конечно, вы можете опираться на обе эти причины, чтобы оправдать использование гибких плат. С этой точки зрения, давайте рассмотрим некоторые применения и примеры дизайна жестко-гибких печатных плат, чтобы увидеть, какие вопросы возникают при проектировании гибких схем.
Примеры применения динамических гибких плат
Мехатронная портальная система
Очень типичное применение динамических гибких плат, например, как вы можете найти в 3D-принтере или головке станка с ЧПУ, - это мехатронная портальная система. В физически больших системах, где электронные компоненты должны следовать за тем же движением, что и механический элемент, это достигалось бы с помощью отдельных жестких плат или модулей, которые соединялись бы кабелями. В более маленьких и изящных устройствах более подходящим решением является гибкая лента, так как она обеспечивает низкопрофильную сборку, а также необходимое движение.
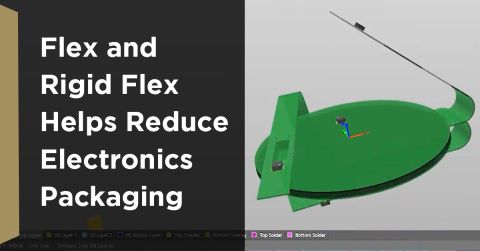
Естественно, приведенный ниже пример будет размещен вдоль портальной системы по оси X, а инструмент на оси Z будет перемещаться по ней. В примере ниже показаны только две оси движения, а сама портальная система будет перемещаться по оси Y.
Общая длина гибкой ленты - это максимальное расстояние от края до края, учитывая углы и изгибы. Угол, который находится за движущейся головкой инструмента по оси Z, будет прилегать к каретке оси X, перемещающейся вдоль портала (вероятно, на втулочных подшипниках). Концы будут усилены для завершения секции гибкой ленты. Для такого типа применения лучше всего использовать однослойную медь, полученную методом прокатки и отжига, и стараться делать радиусы изгиба как можно больше на практике. Это поможет максимизировать срок службы, поскольку область изгиба прокатывается вдоль всей длины гибкой ленты.

Пример конструкции гибкого соединения для портала.
Рассмотрение производства портальной конструкции: Панелизация
Приведенный выше пример поднимает важный вопрос о производстве и стоимости. Используя правоугольную L-образную схему, как в этом случае, мы могли бы, для примера, разместить шесть идентичных гибких лент на одной производственной панели. Это приводит к примерно 50% потери площади панели, и если компоненты должны быть установлены на этой конкретной гибкой схеме, это также увеличит стоимость и время наладки. Пример панели, изготовленной из этой конкретной гибкой схемы в встроенном массиве плат показан ниже.

Панелизация платы встроенного массива для гибкой схемы CNC портала.
Хорошо в использовании гибких плат заключается в том, что если мы используем подходящие материалы и правильно планируем сборку в целом, мы также можем создать складки с малым радиусом. Размещение статического гибкого участка с постоянным изгибом является хорошей альтернативой использованию изогнутых гибких плат, как показано на панели выше, но только в определенных обстоятельствах. На следующем рисунке показан тот же дизайн портала, но с согнутым под 45° изгибом вместо угла в 90°, показанного в предыдущей версии.

Переделанный гибкий портал со статическим изгибом.
Складка становится явно полезной, когда мы смотрим на панель (показана ниже). Чтобы изготовить гибкую плату с таким изгибом, нам не нужно проектировать изгиб на плате. Вместо этого мы можем использовать прямой участок на гибкой печатной плате, так что теперь мы можем выстроить целый ряд гибких лент в одной панели. Таким образом, выход увеличивается значительно. Общая стоимость на плату будет уменьшаться из-за увеличенного выхода на панель и затем упрощения инструментария для сборки методом "pick-and-place". Однако это может быть компенсировано необходимостью размещения компонентов на противоположной стороне на одном конце сборки из-за складки.

Панель с переработанной платой портала.
Вращающиеся устройства
Взгляните на макет жёстко-гибкой печатной платы, показанный ниже. В этом макете гибкие слои создаются с использованием изгибов, а не постоянного сгиба. Обратите внимание на использование горизонтальных направляющих в редакторе ПП; это позволяет точно спроектировать контур платы на основе криволинейных окружностей секций гибкой цепи на месте. Это также позволяет точно разместить линии изгиба гибкой цепи в режиме планирования платы внутри редактора ПП, что позволяет точно симулировать изгибы гибкой цепи в 3D режиме.

Макет ПП для динамического гибкого дизайна с вращением. Гибкие ленты могут быть прикреплены к фиксированному корпусу или другому компоненту, который будет вращаться вместе с центральным валом в сборке.
В этом примере шаговый двигатель должен быть установлен на сборку таким образом, чтобы двигатель и его печатная плата управления находились в движении, в то время как вал будет неподвижен. Гибкие цепи разработаны так, чтобы быть закрепленными на крайних концах к фиксированной базовой сборке и сложенными в форме цилиндра, сгибаясь назад, чтобы позволить движение в обе стороны. 3D виды этого дизайна показаны ниже.

3D-вид вращающейся платы управления шаговым двигателем. Более длинные "руки" позволили бы достичь вращения двигателя и его платы управления на угол больше 360°.

Полностью сложенный вид сборки, включая 3D-корпус шагового двигателя.
Мы можем видеть направления движения и закрепленные гибкие концевики цепи, чтобы дать вам представление о том, как будет работать эта сборка. Такая конструкция относительно легко позволяет достичь вращения более чем на 360°. Этот пример является гипотетическим и показывает шаговый двигатель, хотя такой дизайн хорошо подошел бы для приложений роторных датчиков. Завершенные жестко-гибкие секции также могли бы крепиться к некоторым компонентам на корпусе, при условии, что корпус вращается, предоставляя простой способ обеспечить соединение обратно к жесткой секции платы управления.
Примеры применения статической гибкой связи
Планарные магнетики (трансформаторы и индукторы)
Использование гибких и жестко-гибких схем для интегрированных плоских магнитиков становится всё более популярным. Применение гибких схем для плоских магнитиков имеет ряд отчётливых преимуществ. Полиимидная плёнка доступна в толщинах, которые обеспечивают очень высокую изоляцию обмоток, а также высокую температурную стабильность, что делает её подходящей для процессов заливки горячим эмалевым составом. С точки зрения потерь; использование травленых медных дорожек требует, чтобы дорожки были шире, но это может легко снизить потери на вихревые токи, поскольку дополнительное сопротивление от скин-эффекта будет уменьшено.

Развернутые витки соленоида индуктивности с четырьмя обмотками.
Ниже показана интересная схема входа и выхода для свёрнутого воздушного сердечника индуктивности. В этой свёрнутой сборке гибкой печатной платы конец каждой обмотки перекрывается с началом следующей обмотки. Это может быть сделано для увеличения количества витков по сравнению с простым наличием нескольких отдельных обмоток.

Свёрнутые обмотки индуктивности.
18 слоёв по цене 2
Естественным развитием этой концепции является включение в дизайн вашего преобразователя некоторых гибких слоев с намерением сложить их друг на друга. В приведенном ниже примере показан дизайн трансформатора на 2-слойной гибкой плате, где одноцентровое планарное ферритовое сердечник E18 выступает через вырезы в концевой области терминатора (с левой стороны). Эту идею можно было бы произвольно расширять (хотя с практическими ограничениями по толщине конечной сложенной платы). На рисунке 11 верхний и нижний медные слои на двусторонней гибкой плате дают 18 используемых слоев для обмоток трансформатора.
Вокруг каждого из вырезов центральной ноги сердечника вы можете сделать один виток для обмотки индуктора. Прокладывание дорожки вокруг боковой ноги даст вам половину витка, в то время как возвратный путь обеспечивает другую половину витка в катушке трансформатора; вместе сложенные секции проводника формируют набор уложенных друг на друга токовых петель, которые могут генерировать и принимать магнитное поле.

Вид сверху на трансформатор на гибкой плате. На верхнем слое показана одна обмотка для сильного тока, а на нижнем слое проложено шесть обмоток для слабого тока.
Это может быть запутанным, поскольку вам нужно следить за правильным направлением намотки относительно каждого сгибаемого участка в связи с геометрией ферритового сердечника. Учитывая, что вся эта гибкая схема будет складываться ортогонально, я добавил стрелки на слой Mechanical 1 дизайна, направленные в противоположную сторону каждому соседнему слою намотки, чтобы напомнить мне, в какую сторону прокладывать медь. Это показано ниже для наглядности.

Слой Mechanical 1, показывающий контур платы и стрелки направления намотки для ориентации.
Ниже показана окончательная сборка сердечника и гибкой части. Обратите внимание, что это может быть интегрировано в жестко-гибкий дизайн, где большая часть схемы находится на жесткой двухслойной печатной плате, а гибкая часть используется для добавления дополнительных слоев, необходимых для всех обмоток сердечника. Конечно, будет компромисс между использованием большой гибкой области и простым добавлением кучи слоев к дизайну, предназначенному только для жестких плат.

Окончательный полностью сложенный трансформатор, с 3D моделью магнитного ферритового сердечника Ferroxcube E18 через вырезы.
Многослойный жестко-гибкий
Для многих военных, аэрокосмических или подобных высокоплотных проектов, требующих компактных, надежных сборок в ограниченных пространствах, сложно избежать использования нескольких слоев гибких печатных плат между жесткими участками платы. Тем более это необходимо для высокоскоростных цифровых проектов из-за необходимости экранирования или слоев плоскостей между шинами, проходящими через гибкие регионы. Здесь задача состоит в том, чтобы поддерживать хорошую степень гибкости. Количество слоев гибкой печатной платы должно быть сведено к минимуму, обычно это два медных слоя на одном полиимидном субстрате с полиимидными покрытиями.
В «обычных» проектах длина секций гибкой печатной платы одинакова для перекрывающихся гибких регионов. Это означает, что вы сталкиваетесь с ситуацией, показанной ниже, где сгибы могут создавать значительное напряжение в гибких областях между жесткими платами после установки в окончательную сборку.

Напряжение во внешней гибкой печатной плате и сжатие внутренней платы будут возникать, когда несколько перекрывающихся гибких слоев спроектированы одинаковой длины. Обратите внимание на «выдавливание» капли клея, используемого в этом проекте, прямо там, где гибкая плата входит в жесткий участок.
Большинство специалистов по производству жестко-гибких плат на этом этапе рекомендовали бы использовать конструкцию "книжного переплета". Конструкция "книжного переплета" является жизнеспособным методом, при котором радиусы изгибов гибкой цепи на месте используются для определения правильной длины для каждой комбинации гибкой цепи и подложки в стопке слоев. Пример иллюстрации концепции показан в выдержке из IPC-2223b ниже.

Конструкция "книжного переплета" [Источник: IPC-2223B, 2008 г., стр. 26].
Сразу видно, что этот метод будет стоить денег и увеличивать сложность дизайна. Часто лучшей альтернативой является использование гибких цепей одинаковой длины и радиуса, но размещение различных слоев гибких цепей так, чтобы они не перекрывали друг друга. Пример этого показан ниже.

Альтернативная конструкция "книжного переплета". Обычно, гибкие секции могут перекрываться и потребовали бы разной длины для поддержания низкого напряжения/сжатия. В этой альтернативе, гибкие секции размещаются в разных областях по краям жестких секций, так что они больше не нуждаются в перекрытии.
Очень тугие изгибы без потери количества слоев
С помощью некоторых творческих решений в области изгиба возможно получить очень тугие изгибы без потери медных слоев.
На маленькой плате, показанной ниже, используется лента в форме буквы "S" для определения изгибов и уменьшения минимального радиуса изгиба вдоль края укрепленных областей. На этой фотографии не видно, но на участках, на обратной стороне которых были приклеены тонкие укрепители, установлены компоненты.

Получение практически 180° радиуса изгиба с несколькими слоями меди.
Эту концепцию можно расширить в нескольких направлениях. Показанный ниже дизайн печатной платы является ультрагибкой платой для дисплея. Вы можете видеть множество светодиодов в матрице на более широких, жестких участках. Вся сборка жесткая только в этих участках благодаря большому количеству слоев меди и пленки PI, сламинированных вместе. Опять же, использование изгибов в форме буквы S между этими областями матрицы светодиодов позволяет этой сборке легче изгибаться в изогнутый корпус.

Гибкий массив с изгибами X-Y в форме буквы S.
Продвиньте эту концепцию ещё дальше, и вы получите очень компактный дизайн, показанный ниже. Секции гибкой печатной платы в этом примере содержат 8 слоёв. Такие гибкие схемы обычно не были бы гибкими, если бы их разместили как прямые ленты между жёсткими секциями. Однако использование множества S-образных изгибов (обратите внимание, что верхние слои гибкого материала полностью изготовлены из меди для экранирования!) позволяет им достаточно сгибаться, чтобы поместиться в окончательный механический корпус, даже с сотнями высокоскоростных соединений памяти и дисплея.

8 слоёв гибкости, плюс 4 дополнительных слоя жёсткой печатной платы. Обратите внимание, что верхний слой гибкости полностью выполнен из медного слоя для экранирования. Также обратите внимание на защитный клей по краям интерфейсов жёсткого и гибкого соединения.
Разработка для любого приложения жёстко-гибкой печатной платы легко осуществляется с полным набором функций для проектирования и производства печатных плат в Altium Designer®. Как только вы будете готовы передать данные вашего проекта производителю, вы можете легко делиться и сотрудничать над своими проектами через платформу Altium 365™. Всё, что вам нужно для проектирования и производства передовой электроники, можно найти в одном программном пакете.
Мы только начали раскрывать возможности использования Altium Designer на Altium 365. Начните вашу бесплатную пробную версию Altium Designer + Altium 365 уже сегодня.
Об авторе
Related Technical Documentation
Связанные ресурсы
Оглавление
От проектирования до выпуска — без лишних сложностей
- Привязывайте проверки к правильной версии
- Снижайте путаницу при передаче и объем доработок
- Раньше выявляйте риски, связанные с поставками и выпуском
- Работайте самостоятельно, делитесь при необходимости
Начать
Thank you, you are now subscribed to updates.

