










Symulacja impedancji przesłoniętej płaszczyzny masy w elastycznych PCB

At a Glance
Elastyczne PCB również mogą być PCB wysokiej prędkości, ale wymagają siatki masy. Oto kilka wskazówek, jak określić impedancję na siatkach masy.







Giętkie PCB oraz PCB typu rigid flex mogą przesyłać sygnały o wysokiej prędkości, niektóre z nich wymagają kontrolowanej impedancji. Implementacja kontrolowanej impedancji na giętkim PCB nie jest łatwym zadaniem z kilku powodów. Jeśli wybierzesz ścieżkę kontrolowanej impedancji, gdzie producent testuje impedancję i dokonuje korekt w układzie warstw, rzadko masz wolność działania, ponieważ może to zmusić do zbyt grubego lub zbyt cienkiego grubości warstwy giętkiej. Jeśli zdecydujesz się na kontrolowaną dielektryczność, struktura płaszczyzny masy unieważnia typowe modele dla impedancji, więc bardzo trudno jest określić odpowiednią impedancję.
Niestety, oznacza to, że musisz użyć pewnych symulacji lub danych testowych, aby określić impedancję pojedynczych ścieżek i par różnicowych w giętkich PCB. Nie wszyscy producenci mogą dostarczyć te dane, lub jeśli je posiadają, mogą nie udostępniać ich publicznie. Jeśli chodzi o pary różnicowe, odstęp również będzie krytycznym czynnikiem określającym impedancję wzdłuż połączenia.
W tym artykule, inspirowanym pracą Lukasa Henkla, przedstawię krótki zestaw wyników symulacji i przepływ pracy, który może być użyty do określenia impedancji ścieżek na płaszczyznach masy z siatką.
Motywacja do symulacji impedancji płaszczyzny masy z siatką
Niedawno przeprowadziliśmy kolejny wywiad z Lukasem Henkelem, gdzie omówiliśmy niektóre z jego postępów w projekcie Open-Source Laptop Project. Projekt ten obejmował stworzenie płyty głównej oraz peryferiów dla laptopa open-source, a jednym z peryferiów jest kamera internetowa, która umieszczona jest w górnej części ekranu. Zapoznaj się z naszym fragmentem wywiadu, aby dowiedzieć się więcej, lub obejrzyj cały odcinek na YouTube.
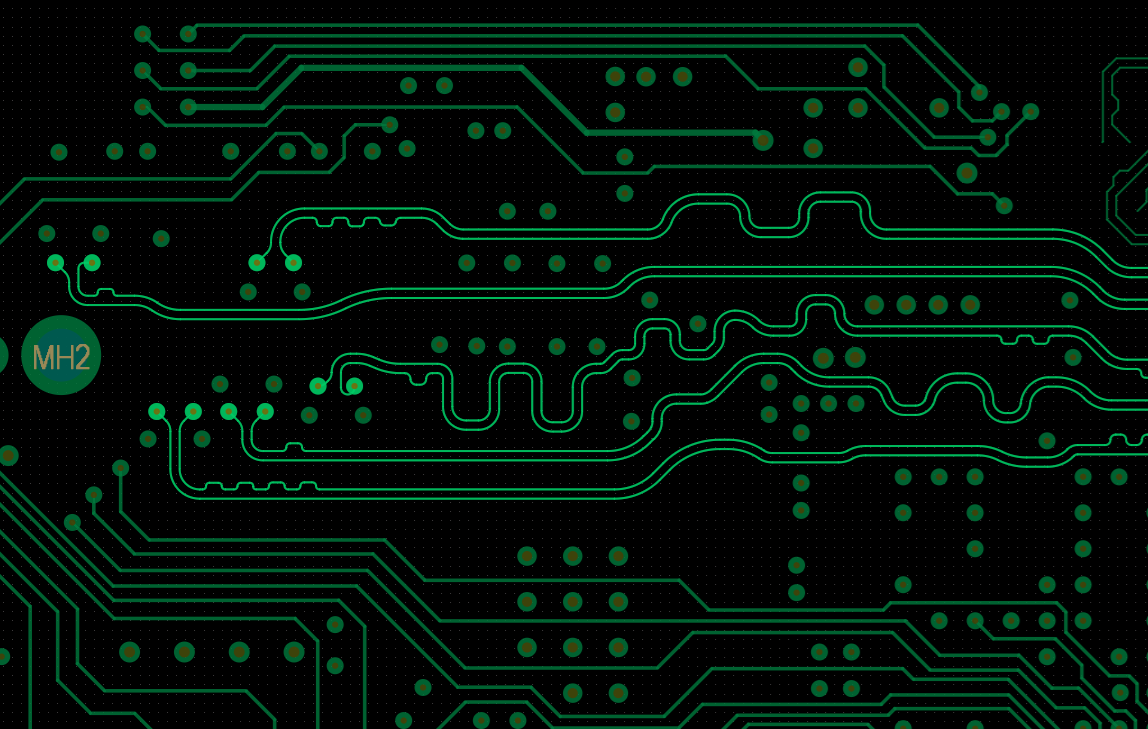
Odwołując się do części projektu dotyczącej kamery internetowej w tym fragmencie, kamera łączy się z płytą główną za pomocą elastycznej płytki drukowanej (flex PCB). Aby przesłać dane z kamery do procesora, potrzebne jest szybkie połączenie szeregowe. Wymaga to użycia MIPI CSI-2, szybkiego interfejsu różnicowego, który wysyła dane szeregowe przez cztery równoległe ścieżki z zegarem różnicowym zsynchronizowanym ze źródłem. W sumie daje to do pięciu par różnicowych biegnących między kamerą a płytą główną.
Routing CSI-2 przez 4 ścieżki danych i ścieżkę zegara zsynchronizowanego ze źródłem. Obie ścieżki w każdej parze różnicowej wymagają dostrojenia długości, a pary różnicowe muszą być dopasowane w ramach tej grupy.
Będąc interfejsem różnicowym, proszę używać par różnicowych wymagających kontroli impedancji do 100 omów. Na sztywnej płytce PCB byłoby to dość łatwe. Użyj menedżera warstw i Altium Designer lub innego symulatora, aby szybko uzyskać impedancję bezstratną na podstawie przekroju warstw. Na elastycznej płytce PCB nie jest to takie proste, ponieważ elastyczne PCB używają przesiatkowanej płaszczyzny masy. Teraz, przyjrzyjmy się krótko teorii, która pokazuje, dlaczego tak jest. Następnie możemy pokazać kilka wyników symulacji dla elastycznej taśmy Łukasza, które szczegółowo przedstawią impedancję różnicową i różnicowe parametry S.
Współczynnik wypełnienia jest kluczowym parametrem określającym impedancję
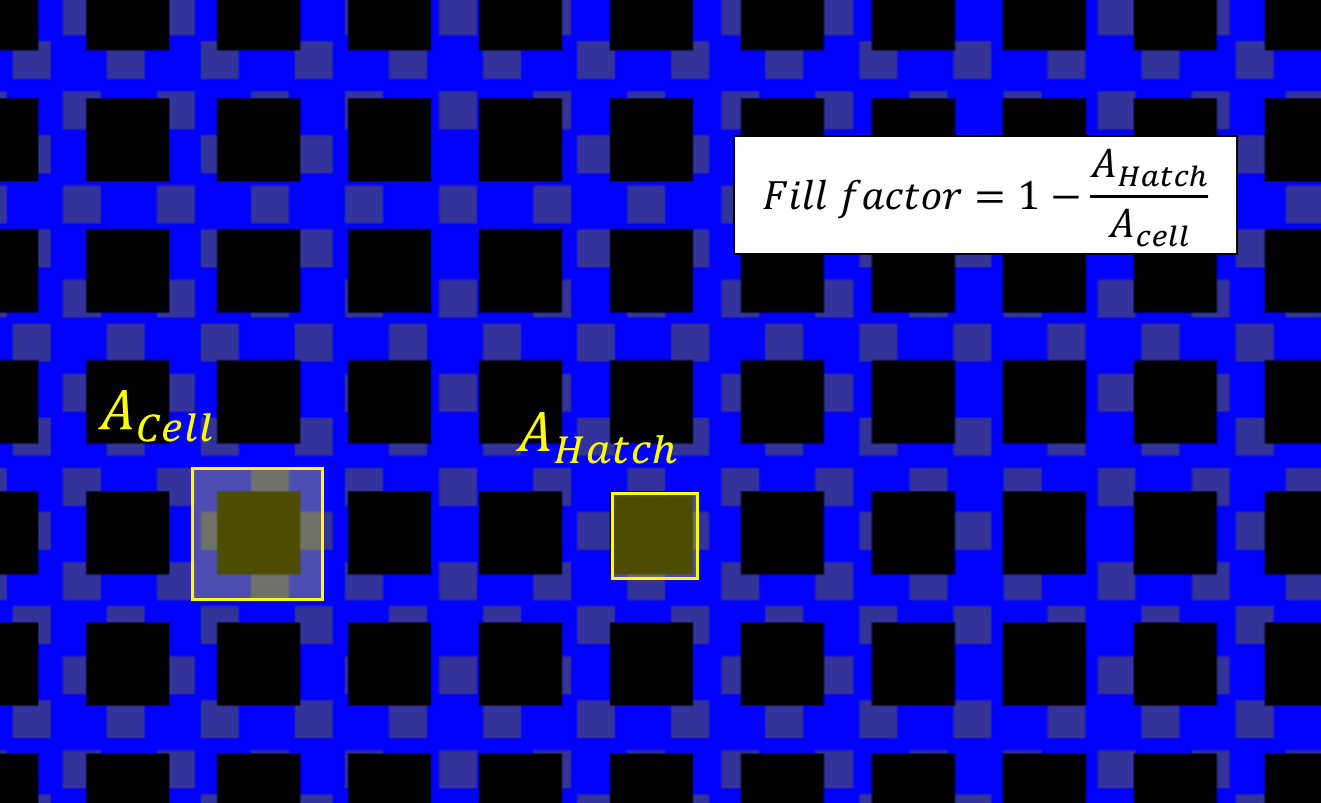
Podczas oceny impedancji połączenia miedzianego na elastycznej płytce PCB z przesiatkowaną płaszczyzną masy, jednym z narzędzi, które możemy użyć do zrozumienia, co dzieje się w połączeniu, jest impedancja wejściowa. Jeśli spojrzysz na strukturę przesiatkowanej płaszczyzny masy, przesiatkowanie ma pewne obszary, z których usunięto miedź, zwykle w kształcie kwadratu lub diamentu, i ten obszar można zdefiniować jako pewną część powtarzających się elementów obszaru, które tworzą przesiatkowaną płaszczyznę masy. Nazwałem ten ułamek "współczynnikiem wypełnienia", który można zdefiniować, jak pokazano na poniższym obrazie.
Teraz przeprowadźmy ścieżkę przez różne regiony powyższej struktury; niektóre części ścieżki będą przebiegać nad stałą miedzią, podczas gdy inne części ścieżki będą prowadzone nad regionem, z którego usunięto miedź. Zmienna obecność masy w pobliżu ścieżki wpłynie na impedancję, a tym samym na integralność sygnału na tych trasach. Wzdłuż długości ścieżki spodziewalibyśmy się zmian wysokiej i niskiej impedancji, która będzie funkcją odległości ścieżki od miedzi.
Ponieważ mamy zmianę impedancji wzdłuż długości trasy, struktura ta jest okresowo kaskadowaną linią transmisyjną. Nie widziałem dobrego źródła w literaturze badawczej, które konkretnie opisywałoby ten typ struktury, chociaż odnoszę się do niego w tym artykule. W każdym razie, istnieje impedancja wejściowa w każdej sekcji, którą można wyrazić w terminach następnej sekcji linii transmisyjnej:
W prostszych słowach, jeśli znasz charakterystyczną impedancję każdego z odcinków linii transmisyjnej, możesz uzyskać rozsądne oszacowanie parametrów S za pomocą obliczeń indukcyjnych, co byłoby na tyle proste, że można by to zrobić w skrypcie Pythona lub w Excelu. Na przykład, jeśli znasz impedancję nad miedzią i w regionie kratowym, można by użyć powyższego równania iteracyjnie, aby oszacować stratę zwrotną (S11) na porcie wejściowym.
Uważam, że ta metoda jest dokładniejsza niż próba założenia stałej płaszczyzny, a następnie stosowanie pewnego współczynnika korekcyjnego, ale myślę, że jest to temat do dalszych badań. W każdym razie, gdy masz oszacowanie impedancji jedno- lub dwukierunkowej nad płaszczyzną uziemienia z kratownicą, ostatecznie będziesz musiał to zweryfikować, co wymaga symulacji 3D.
3D Symulacje płaszczyzn uziemienia z kratownicą
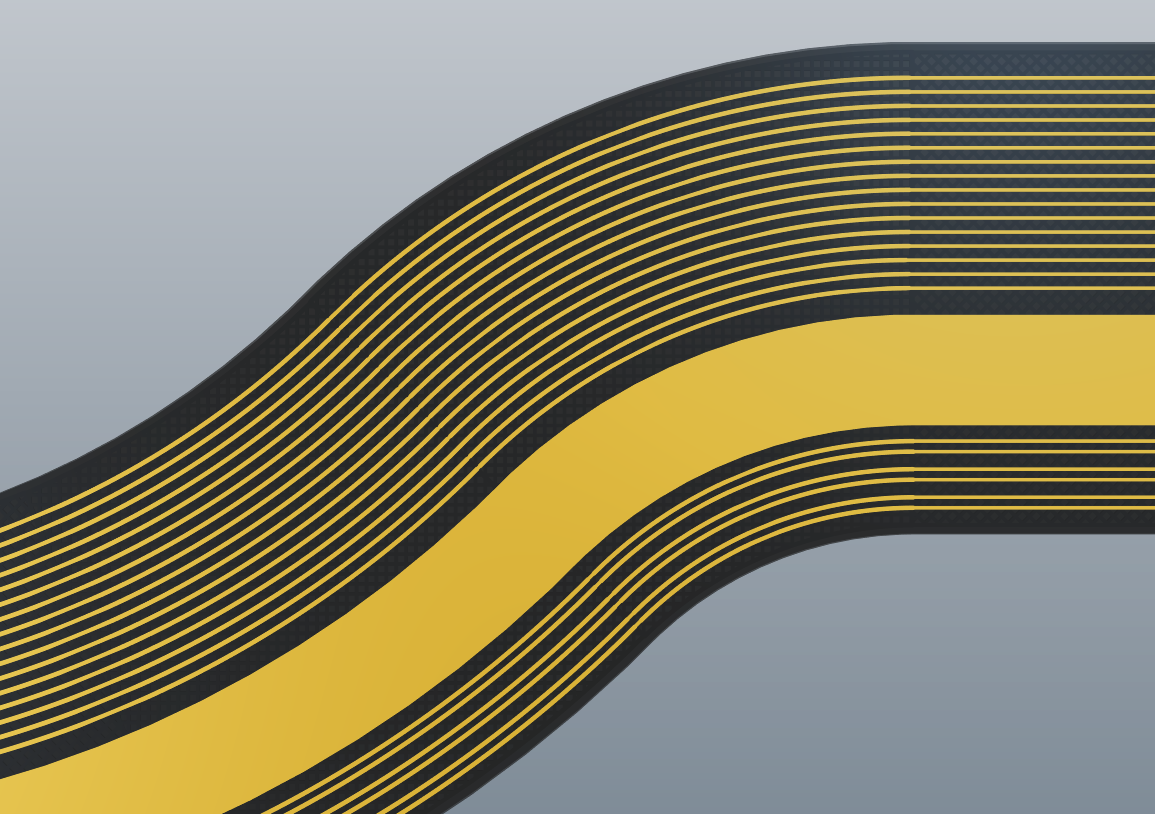
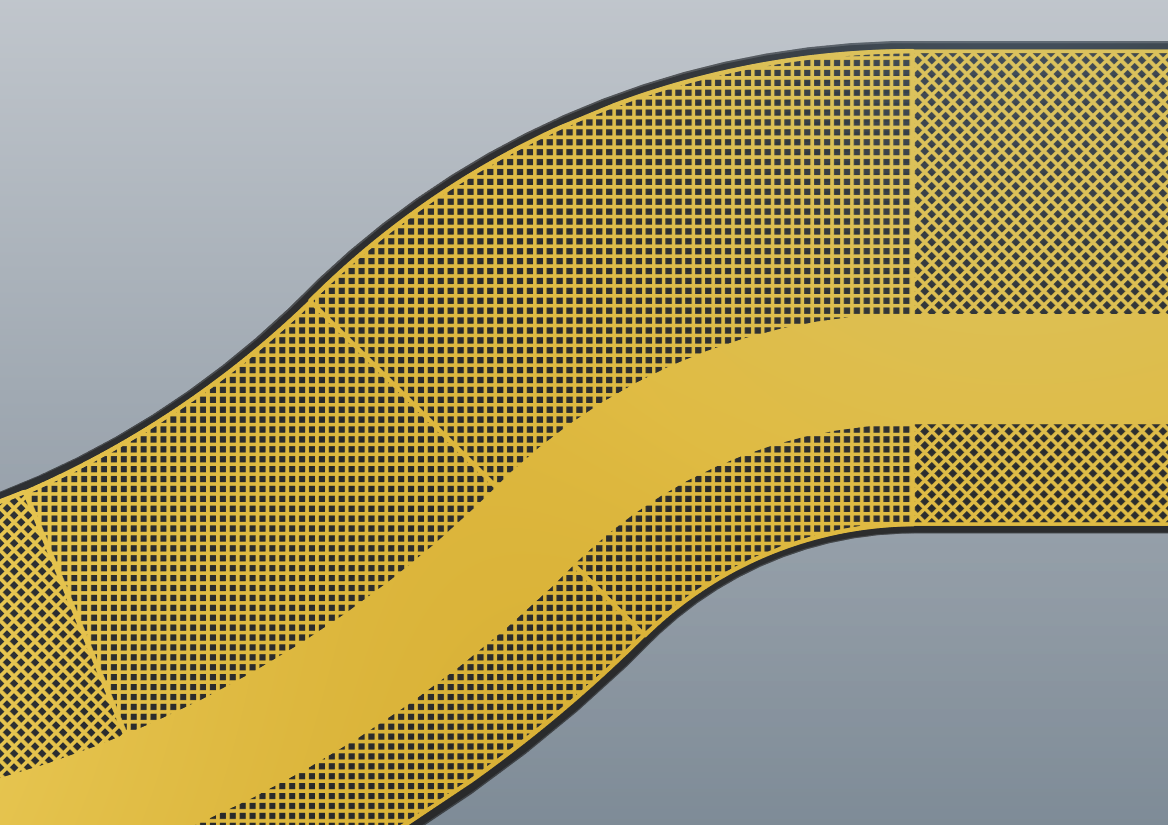
Aby w pełni ocenić wydajność połączeń na płaszczyźnie uziemienia z kratownicą, użyjemy pokazanej poniżej elastycznej taśmy, dostarczonej przez Lukasa Henkla dla laptopa open source. Poniższy obraz przedstawia widok 3D elastycznej taśmy i trasowania ścieżek w dwóch regionach, jak również grupy ścieżek w każdym regionie.
Warstwa 1:
Warstwa 2:
Najpierw, aby uzyskać pewne wartości impedancji charakterystycznej w każdej sekcji, używany jest analizator zgodności w Simbeor, aby uzyskać impedancje na podstawie przekrojów ścieżek. Zbadano i porównano dwie regiony. W prostej sekcji wychodzącej bezpośrednio z konektora kamery, impedancja linii jednostronnych wydaje się wykazywać znacznie mniejszą zmienność; impedancja waha się od 30-40 omów wzdłuż prostych odcinków. W zakrzywionej części kabla elastycznego, zmienność impedancji jest znacznie większa, z impedancją charakterystyczną w zakresie od 30-60 omów.
Szeroka linia (W/H = 4) tworzy regiony o bardzo niskiej impedancji nieparzystego trybu na miedzi, podczas gdy regiony między miedzią są znacznie bliższe celowi 50 omów. Dokładna zmienność wydaje się wynosić około 28-62 omy, czyli średnio 45 omów impedancji nieparzystego trybu. Impedancja różnicowa wynosi w przybliżeniu 78 omów z pewnymi wariacjami.
Prosta sekcja:

Zakrzywiona sekcja:

Na podstawie tego, co już widzimy, występują pewne duże odchylenia impedancji wzdłuż łącza, chociaż są one małe na swojej długości, więc spodziewalibyśmy się pewnej konwersji trybu wzdłuż tego łącza. Pełna macierz parametrów S dla tego łącza powie nam o stratach i konwersji trybu, a wyniki są pokazane w następnej sekcji.
Wyniki parametrów S CSI-2
Teraz przyjrzyjmy się parametrom S dla łącza CSI-2, ponieważ jest ono kontrolowane pod kątem impedancji. Bazując tylko na wartościach impedancji przekroju pokazanych powyżej, staje się dość niejasne, jakie będzie rzeczywiste tłumienie zwrotne wzdłuż połączenia. Dlatego przeprowadzamy symulację parametrów S dla tej geometrii, aby określić tłumienie zwrotne aż do bardzo wysokich częstotliwości. Poniższy obraz pokazuje wyniki dla wyróżnionej wyżej ścieżki CSI-2.
Tłumienie zwrotne jest akceptowalne w granicach wymaganych dla łącza CSI-2; tłumienie wstawiania jest dość niskie w pasmie kanału dzięki szerokości ścieżek, ale gwałtownie spada poza limit pasma. Jednym z problemów tutaj jest konwersja trybu, w szczególności SCD21 (prawy dolny wykres), czego można się spodziewać, biorąc pod uwagę nieciągły charakter przekreślonej płaszczyzny masy. Ten link wykazuje dużą konwersję trybu, którą należałoby sprawdzić pod kątem limitów MIPI C-PHY.

Jeśli chciałbyś poprawić wyniki tłumienia zwrotnego i tłumienia wstawiania, musiałbyś dostosować współczynnik wypełnienia i odstępy dla różnicowego połączenia. Następnie musiałbyś ponownie przeprowadzić symulację i sprawdzić, czy parametry S uległy poprawie. Więcej szczegółów znajdziesz w poniższej sekcji przepływu pracy.
Podsumowanie wyników i przepływu pracy
Dla naszych celów, gdzie analizujemy tylko trasowanie ścieżek na PCB, ten wynik jest akceptowalny. W rzeczywistości parametry S dla pełnego połączenia będą zależeć od niedopasowania impedancji na interfejsach kablowych wchodzących do złącz. Aby rozszerzyć symulację poza to, co pokazano powyżej, musielibyśmy wykonać następujące czynności:
- Eksport pliku Touchstone parametrów S dla tego połączenia.
- Pobranie plików Touchstone dla złącz na każdym końcu.
- Pobranie pliku Touchstone dla połączenia prowadzącego do procesora i chipa kamery.
- Dodanie wszystkich tych elementów do liniowego modelu sieciowego.
- Określenie parametrów S dla całej kaskadowej sieci.
- W zależności od tych wyników, może być konieczne dostosowanie współczynnika wypełnienia dla przekreślonej masy poniżej pary różnicowej CSI-2.
- Iteruj i powtarzaj.
Powyższy proces ilustruje przepływ pracy, który należy zaimplementować w celu określenia impedancji ścieżki dla linii CSI-2. Ze względu na brak dokładnych wyników analitycznych, które mogłyby być użyte do przewidywania impedancji ścieżki nad przekreśloną płaszczyzną masy, należy zacząć od szacunku opartego na współczynniku wypełnienia, a następnie iterować przez kilka wariantów, aby uzyskać odpowiednią impedancję ścieżki. Proponuję następujący przepływ pracy:
- Zacznij od zaproponowanego projektu przekreślenia i oblicz współczynnik wypełnienia.
- Oblicz dwa dodatkowe współczynniki wypełnienia, które będą używane jako warianty.
- Zaprojektuj małą płytę testową z tymi wariantami i symuluj parametry S dla każdej z nich.
- Zbadaj wyniki parametrów S i wybierz najlepszy współczynnik wypełnienia.
- Dla par różnicowych, zbadaj wynik i określ, czy odstępy powinny być dostosowane w celu zwiększenia lub zmniejszenia impedancji różnicowej.
- Zasymuluj zmodyfikowane połączenie różnicowe i sprawdź parametry S.
- Iteruj i powtarzaj.
Dzięki tym trzem symulacjom, a możliwie czwartej, polegającej na dostosowaniu odstępów między parami różnicowymi, można osiągnąć użyteczny projekt połączenia za pomocą tylko czterech symulacji, które zajmą około 8 godzin czasu symulacji. Jest to wystarczająco szybko, aby zakończyć w ciągu jednego dnia.
Aby zapewnić więcej informacji na temat wydajności połączeń jedno- i dwukierunkowych nad płytami ziemnymi z siatką w elastycznych PCB, planuję przeprowadzić większe badanie geometrii. Będzie to wiązało się ze zmianą wielu parametrów współczynnika wypełnienia i określeniem, który parametr geometryczny jest najskuteczniejszym estymatorem dla impedancji jedno- i dwukierunkowej. Upewnij się, że śledzisz tę serię blogów, aby uzyskać więcej aktualizacji.
Bez względu na to, czy potrzebujesz zbudować niezawodną elektronikę mocy, czy zaawansowane systemy cyfrowe, użyj kompletnego zestawu funkcji projektowania PCB i światowej klasy narzędzi CAD w Altium Designer®. Aby w dzisiejszym środowisku wielodyscyplinarnym wdrożyć współpracę, innowacyjne firmy korzystają z platformy Altium 365™, aby łatwo udostępniać dane projektowe i wprowadzać projekty do produkcji.
Dopiero zaczynamy odkrywać możliwości, jakie daje Altium Designer na Altium 365. Zacznij swoją darmową próbę Altium Designer + Altium 365 już dziś.

About Author
Powiązane zasoby
Related Technical Documentation
Spis treści
Od projektu do wydania, bez zbędnych przeszkód
- Powiąż przeglądy z właściwą wersją
- Ogranicz niejasności przy przekazywaniu i konieczność poprawek
- Wcześniej wykrywaj ryzyko związane z zaopatrzeniem i wydaniem
- Pracuj samodzielnie, udostępniaj w razie potrzeby
Rozpocznij
Thank you, you are now subscribed to updates.

