








Rigid-Flex-PCB-Design: Richtlinien für mechanische Einschränkungen, Stackups und Zuverlässigkeit

At a Glance
Sehen Sie, wie mechanische Randbedingungen für eine Starrflex-Leiterplatte entwickelt werden können und wie sich dies auf den Leiterplattenaufbau auswirkt.







Das Design von Starrflex-Leiterplatten umfasst die Integration flexibler Schaltungsmaterialien mit starren Bereichen, um besondere Designarten zu realisieren. Ziel ist es häufig, Designs in komplexe Gehäuse, kompakte oder gefaltete Bauformen oder Gehäuse mit beweglichen Teilen einzupassen. Starrflex-PCBs erfordern einen anderen Ansatz als das standardmäßige Starrplatten-Design, bieten in bestimmten Fällen jedoch eine höhere Zuverlässigkeit und ermöglichen Funktionen, die sich mit Steckverbindern und Kabeln nur schwer umsetzen lassen.
Wenn Sie noch nie eine Flex-PCB oder eine Starrflex-PCB entwickelt haben, helfen Ihnen diese Richtlinien dabei, Flex- und Starrflex-Leiterplatten mit einzigartiger Funktionalität zu erstellen, die zugleich die DFM-Anforderungen der meisten Hersteller erfüllen. PCB-Stackups für Starrflex-Designs können ebenfalls anspruchsvoll sein, daher geben wir Hinweise zu den verschiedenen Stackups, einschließlich der korrekten Verwendung von Versteifungen.
Arten von Starrflex-Designs und PCB-Stackups
Die verschiedenen Arten von Starrflex-Designs werden immer durch das PCB-Stackup definiert, da dieses die Funktionalität in einer Starrflex-PCB ermöglicht. Nachfolgend finden Sie eine kurze Liste verschiedener Arten des Starrflex-PCB-Designs sowie einige Abbildungen, die zeigen, was möglich ist.
- Integriertes Starrflex: die häufigste Art von Starrflex, bei der der flexible Bereich in ein PCB-Stackup laminiert wird
- Starrflex mit Versteifungen: Anstatt den flexiblen Bereich in das Stackup zu laminieren, versteift eine Prepreg-Lage den Flexbereich in bestimmten Zonen
- Vollständig flexible PCB oder FPC: ein Design ganz ohne starre Bereiche, das typischerweise als Ersatz für ein Kabel verwendet wird
- Buchbinder-Starrflex: ein Design mit mehreren überlappenden Flexbereichen, die übereinander gefaltet werden können
- Dynamisch biegefähiges Starrflex: ein Starrflex-Design, das für wiederholtes Biegen während des Betriebs vorgesehen ist
- HDI-Starrflex: ein Design mit lasergebohrten Microvias im starren Bereich, im flexiblen Bereich oder in beiden
- Transparentes Starrflex: ein Design, das vollständig transparente flexible Materialien mit einem starren Stackup oder einer Versteifung verwendet
- PTFE-basiertes Starrflex: ein Starrflex-Design, das PTFE-Kerne und Bondplies zum Aufbau des starren Teils des Stackups verwendet
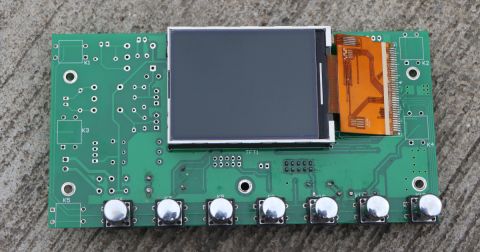
Starrflex-Designs können mehrere Bereiche aufweisen, in denen sich der Flexbereich verzweigt. Dies kann an einem Steckverbinder, einem weiteren starren Bereich, einer Versteifung, Goldfingern oder einer auf dem Flexbereich montierten Schaltung enden. Ein komplexes Beispiel ist unten dargestellt.

Starrflex-PCB-Baugruppen können mehrere Verzweigungen und starre Bereiche aufweisen.
Mechanische Randbedingungen bei Starrflex-Designs
Befestigung
Starrflex-Designs müssen häufig im Gehäuse befestigt werden, was mit Schrauben oder Schnappbefestigungen erfolgen kann. Einige Befestigungsmethoden verwenden auch eine Einschubhalterung, die den flexiblen oder starren Bereich in Position hält. Dafür sind üblicherweise Montagebohrungen erforderlich, um die Starrflex-Baugruppe an ihrem Platz zu halten.
Dauerhafte Verformung
In einigen Starrflex-Baugruppen wird das Flexband dauerhaft gebogen oder während der Installation geknickt, sodass die fertige Leiterplatte ihre Form im Gehäuse beibehält. Dabei handelt es sich um statische Flex-Anwendungen, bei denen die Biegung einmal aufgebracht wird und sich das Band während des Betriebs nicht mehr bewegt. Wenn diese dauerhafte Verformung vorgesehen ist, sollte der Entwickler den Knick- oder Faltbereich im PCB-Layout mithilfe von Keepout-Bereichen definieren. Diese Keepouts verhindern, dass Bauteile, Vias und Leiterbahnen in der Zone platziert werden, in der die Biegung auftritt, da Kupferstrukturen in einer Knickzone konzentrierten mechanischen Spannungen ausgesetzt sind, die im Laufe der Zeit Leiterbahnen reißen oder Lötstellen brechen lassen können. Werden diese Keepouts frühzeitig im Layout definiert, idealerweise auf Grundlage des MCAD-Modells des Gehäuses, ist sichergestellt, dass das Flexband ohne unerwartete Kollisionen in seine endgültige Position gefaltet werden kann.
Biegegrenzen
Die Unterscheidung zwischen statischem und dynamischem Biegen ist die wichtigste Randbedingung, die den minimal zulässigen Biegeradius in einem Starrflex-Design bestimmt. Statisches Biegen liegt vor, wenn das Flexband während der Installation einmal oder nur wenige Male gebogen wird und dann über die gesamte Lebensdauer des Produkts in einer festen Position verbleibt. Dynamisches Biegen liegt vor, wenn das Flexband während des normalen Betriebs wiederholt und fortlaufend gebogen wird, etwa in einem Scharnier, einem Robotergelenk oder einem Wearable. Der minimale Biegeradius wird als Vielfaches der gesamten Flexdicke im Biegebereich definiert. Für statische Flex-Anwendungen gilt allgemein ein minimaler Biegeradius von 6x der Flexdicke, wobei 10x als konservativerer und weithin empfohlener Ausgangswert gilt. Für dynamische Flex-Anwendungen steigt der erforderliche Biegeradius deutlich an, häufig auf 100x der Flexdicke, abhängig von der erwarteten Anzahl an Biegezyklen über die Produktlebensdauer.
Als Rechenbeispiel betrachten wir einen 11 mil dicken vierlagigen Flexbereich in einer statischen Anwendung. Unter Verwendung der konservativen 10x-Richtlinie:
Rmin = 10T = 10×11 mils = 110 mils
Unter Verwendung der absoluten Mindestvorgabe von 6x:
Rmin = 6T = 6×11 mils = 66 mils
Würde derselbe 11-mil-Flexbereich in einer dynamischen Anwendung mit hoher Zyklenlebensdauer eingesetzt, müsste der Biegeradius auf ungefähr folgenden Wert erhöht werden:
Rmin = 100T = 100×11 mils = 1100 mils
Dies veranschaulicht, wie schnell die mechanische Hüllkurve wächst, wenn ein Flexbereich wiederholtes Biegen überstehen muss. Geringere Kupferdicken (eine halbe Unze oder ein Drittel Unze), gewalztes geglühtes Kupfer und klebstofffreie Laminate tragen alle zur Verbesserung der Biegelebensdauer bei, beseitigen jedoch nicht die Notwendigkeit, die Biegeradius-Vorgabe einzuhalten.
Diese Biegegrenzen schaffen eine direkte Kopplung zwischen dem Starrflex-PCB-Stackup und dem mechanischen Gehäusedesign. Wenn die Gehäusegeometrie zuerst festgelegt wird, bestimmt der verfügbare Raum für die Biegung des Flexbands die maximale Flexdicke und den minimalen Biegeradius, die der PCB-Designer verwenden kann. Umgekehrt erzwingt ein zuerst auf Basis elektrischer Anforderungen wie Lagenzahl, Impedanz oder Kupferdicke definiertes Stackup eine minimale Biegeradius-Vorgabe, die der Mechanikdesigner im Gehäuse berücksichtigen muss.
In der Praxis bedeutet dies, dass PCB-Stackup und Gehäusegeometrie gemeinsam entwickelt werden müssen. Ein vierlagiger Flexbereich, der die elektrischen Anforderungen erfüllt, kann zu dick sein, um innerhalb des verfügbaren Gehäusevolumens gebogen zu werden, was einen Zielkonflikt zwischen Lagenzahl, Kupferdicke und mechanischem Freiraum erzwingt. Eine frühzeitige Zusammenarbeit zwischen den Teams für Elektrik- und Mechanikdesign, idealerweise über synchronisierte ECAD-MCAD collaboration-Werkzeuge, verhindert Konflikte in späten Entwicklungsphasen, bei denen das Flexband physisch nicht in das Gehäuse passt, ohne seine Biegeradius-Grenzen zu verletzen.
Mechanische und Zuverlässigkeitstests bei einer Starrflex-PCB
Sobald die mechanischen Randbedingungen definiert sind, werden für das Design oder das Produkt als Ganzes häufig typische Zuverlässigkeitstests gefordert. Dann stellt sich möglicherweise die Frage, wie das Starrflex-Design mechanisch validiert werden kann.
EDA-Software bietet diese Art der Validierung nicht direkt. Es gibt jedoch zwei Möglichkeiten dafür:
- Physische Tests: Die Baugruppe kann Vibrationsprüfungen, Umwelttests usw. unterzogen werden, um die Zuverlässigkeit der PCB und der Baugruppe zu verifizieren
- Simulation: Mechanische Simulationen können verwendet werden, um das Verhalten der Baugruppe unter Vibration, mechanischem Schock oder anderen extremen Bedingungen zu verstehen
Für den Simulationsteil ist es möglich, Starrflex-Designs in MCAD-Software zu übernehmen, ohne auf Dateiaustausch angewiesen zu sein. Kommerzielle MCAD software kann Vibrations-, Spannungs-/Dehnungs- und Montagesimulationen für in Altium Develop erstellte Starrflex-Designs bereitstellen. Mit der erweiterten MCAD CoDesigner-Funktion können Anwender einen digitalen Zwilling ihres elektrischen Designs innerhalb kommerzieller MCAD-Software erstellen. Ein Mechanikdesigner kann diesen dann nutzen, um ein Gehäuse zu entwickeln, auf Kollisionen zu prüfen und sogar Hauptkomponenten zu platzieren oder mechanische Randbedingungen für Starrflex zu definieren.

Die erweiterte MCAD CoDesigner-Funktion ermöglicht es Altium-Anwendern, ihr Starrflex-PCB-Layout sofort in gängige MCAD-Anwendungen zu übertragen.
So werden mechanische Randbedingungen eingebunden
Mechanische Randbedingungen in Starrflex-Designs umfassen typischerweise die gesperrte Platzierung bestimmter Bauteile und die Verwendung von Keepouts. Manchmal basieren Keepouts auf der Bauhöhe von Bauteilen, damit es in einer Baugruppe nicht zu Kollisionen kommt. In PCB-Designsoftware werden diese mithilfe von Designregeln und direkt im PCB-Layout gezeichneten Keepout-Definitionen festgelegt.
Definieren von Designregeln für mechanische Randbedingungen
Altium Designer bietet ein regelgesteuertes Designregelsystem, mit dem mechanische Anforderungen direkt während des Layouts durchgesetzt werden können. Abstandsregeln, Platzierungsregeln und regionsspezifische Randbedingungen können alle auf bestimmte Leiterplattenbereiche, Lagenaufbauten oder Bauteilklassen angewendet werden, wodurch sie sich besonders gut für Starrflex-Designs eignen, bei denen unterschiedliche Zonen der Leiterplatte grundlegend verschiedene mechanische Anforderungen haben. Die folgenden Schritte zeigen, wie Designregeln eingerichtet werden, die die Definition mechanischer Randbedingungen in einem Starrflex-Layout unterstützen.
- Design-Workflows reichen von objektzentrierten Tabellenoberflächen bis hin zu klassischen, abfragebasierten Regel-Engines für eine flexible Geltungsbereichsdefinition.
- Die Durchsetzung mechanischer Anforderungen wie Abstände und regionsbezogener Randbedingungen erfolgt durch automatisierte DRC- und Room-Konstrukte.
- Die Optimierung der Signalintegrität umfasst eine präzise Terminierung, eine stackupbasierte Impedanzkontrolle und die Bewertung von Kanalverlusten mithilfe von Augendiagrammen und Impulsantworten.
- Ein zentrales Bibliotheksmanagement reduziert das Designrisiko, indem es die Wiederverwendung validierter Symbole, Footprints und bewährter Schaltungsblöcke erleichtert.
- Die Fertigungsreife hängt von einer frühzeitigen Kommunikation mit Leiterplattenherstellern über Materialverfügbarkeit, Kupferdicken und Via-Seitenverhältnisse ab.
- Integrierte PLM- und MRP-Systeme verbessern die Rückverfolgbarkeit und Transparenz in der Lieferkette und helfen Teams dabei, komplexe Produktlebenszyklen und Beschaffungsschwankungen zu bewältigen.
Verwendung von Keepouts im PCB-Layout
Keepout-Bereiche in einem PCB-Layout definieren Zonen, in denen bestimmte Objekte wie Leiterbahnen, Vias, Bauteile oder Kupferflächen unzulässig sind. In Starrflex-Designs erfüllen Keepouts über die normale Durchsetzung von Abständen hinaus einen strukturellen Zweck: Sie verhindern, dass Kupfer und Bauteile in Biegezonen, Knickbereichen oder Bereichen platziert werden, die für die Passung im Gehäuse frei bleiben müssen. Keepouts können auf bestimmten Lagen gezeichnet oder als mehrlagige Einschränkungen angewendet werden und werden während der DRC gegen die aktiven Designregeln geprüft. Die folgenden Schritte beschreiben, wie Keepout-Bereiche in Altium Designer für ein Starrflex-Layout definiert und angewendet werden.
- Geltungsbereich definieren: Bestimmen Sie, ob der Keepout für alle Signallagen gilt (unter Verwendung der Keepout-Lage) oder für eine einzelne, spezifische Kupferlage.
- Geometrie definieren: Platzieren Sie eine Keepout-Region über dem starren oder flexiblen Bereich, in dem Routing und Platzierung verhindert werden müssen.
- Einschränkungen festlegen: Konfigurieren Sie die Einschränkungen im Eigenschaftenbereich, um bestimmte Objekttypen (z. B. Vias, Leiterbahnen, Pads) innerhalb der definierten Region zu blockieren.
- Überprüfung: Bestätigen Sie, dass automatisierte Routing- und Platzierungsfunktionen gemäß den Regeln blockiert werden, um Designverletzungen in geschützten Bereichen zu verhindern.
Ganz gleich, ob Sie zuverlässige Leistungselektronik oder fortschrittliche digitale Systeme entwickeln müssen – nutzen Sie Altiums vollständigen Satz an PCB-Designfunktionen und erstklassigen CAD-Tools. Altium bietet die weltweit führende Plattform für die Entwicklung elektronischer Produkte, komplett mit den besten PCB-Designwerkzeugen der Branche und funktionsübergreifenden Kollaborationsfunktionen für fortschrittliche Entwicklungsteams. Kontaktieren Sie noch heute einen Experten bei Altium!

Über den Autor / über die Autorin
Related Technical Documentation
Ähnliche Resourcen
Inhaltsverzeichnis
- Mechanische Einschränkungen bei Starrflex-Designs
- Dauerhafte Verformung
- Biegegrenzen
- Mechanische und Zuverlässigkeitstests in einer Starrflex-Leiterplatte
- So berücksichtigen Sie mechanische Einschränkungen
- Definieren von Designregeln für mechanische Einschränkungen
- Verwendung von Sperrbereichen im PCB-Layout
Vom Entwurf bis zur Freigabe – ganz ohne Reibungsverluste
- Prüfungen an die richtige Version binden
- Verwirrung bei Übergaben und Nacharbeit reduzieren
- Beschaffungs- und Freigaberisiken früher erkennen
- Allein arbeiten, bei Bedarf teilen
Erste Schritte
Thank you, you are now subscribed to updates.

