







고급 자동차 레이더가 많은 안테나를 사용하는 이유는 무엇일까요?

At a Glance
고급 자동차 레이더 시스템은 고해상도 이미징, 장거리 및/또는 다중 객체 추적을 위해 대형 가상 배열에 의존합니다.







지난 2년 동안 저는 주로 자동차 시장을 목표로 한 레이더 모듈 열여덟 개 가까이 작업했습니다. 밀접하게 관련된 분야로는 드론 레이더, 로봇 및 산업 시스템을 위한 레이더 센서, 레이더 생체 신호 감지, 움직임 및 제스처 추적, 그리고 고급 보안 시스템이 있습니다. 사업적 관점에서 큰 시장은 자동차 분야로, 점점 더 많은 ADAS 시스템들이 주변 환경에서 중요한 데이터를 포착하는 더 나은 방법을 찾고 있습니다.
이 시스템들의 운영 목표는 자율 주행 차량을 지원할 수 있는 시스템을 구축하는 것과 동시에 일반적으로 차량을 더 안전하게 만드는 것입니다. 그러나 이를 위해서는 매우 높은 주파수에서 작동하는 레이더 시스템이 두 가지 추세를 따르고 있습니다:
- 새로운 레이더는 일반적인 자동차 레이더 모듈에서 사용될 것보다 훨씬 높은 안테나 수를 사용하고 있습니다(예시 보기)
- 레이더 데이터는 추적되는 객체의 추가적인 특성을 추론하기 위해 다른 센서 데이터와 함께 사용될 수 있습니다
이 분야에서 혁신적인 시스템을 설계하려는 사람이라면, 더 높은 안테나 수를 활용할 수 있도록 이러한 PCB 설계 지침을 따르는 것이 중요합니다. 먼저 혁신적인 레이더 시스템이 작은 공간에 많은 안테나를 사용하는 이유와 이러한 고급 기능을 활용하기 위해 PCB가 어떻게 구성되어야 하는지 살펴보겠습니다.
높은 안테나 수는 이미징 기능을 제공합니다
동시에 작동하는 여러 개의 공동 위치한 송수신 안테나를 갖춘 RF 시스템이 있을 때 어떤 일이 발생합니까? 레이더 시스템은 다음 영역에서 기능을 향상시키기 위해 고수의 공동 위치한 안테나를 사용하는 이 아키텍처를 사용하고 있습니다:
- 높은 안테나 수 = 더 높은 해상도
- 높은 안테나 수 = 더 높은 이득 = 더 긴 범위
- 높은 안테나 수 = 더 넓은 스캐닝 시야
- 높은 안테나 수 = MIMO 기능 다수의 객체 추적을 위해
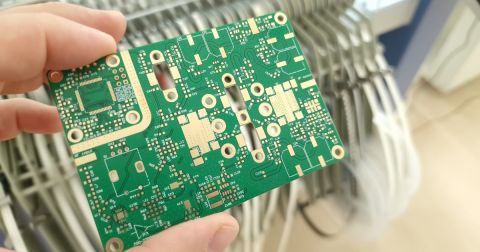
예를 들어, 최근에 공개된 테슬라 레이더 모듈에 사용된 PCB의 이미지를 살펴보세요. 아래 이미지에 표시된 PCB는 Ghost Autonomy의 Tegan Courts에 의한 분해 과정에서 테슬라 레이더에서 가져온 것입니다. 이 이미지에서 우리는 14개의 총 요소와 모듈 전체에 걸쳐 퍼져 있는 234개의 방사 패치를 가진 일련의 병렬 패치 안테나 배열을 볼 수 있습니다.

고밀도 안테나를 탑재한 새로운 레이더 시스템을 설계하는 목표는 이미징 기능을 구현하는 것입니다. 이러한 시스템의 각도 해상도가 충분히 높아지면(각 직교 스캔 방향에서 1도 미만) 이는 이득 대 방위각(또는 이득 대 고도각) 그래프를 보면서 평가됩니다. 일반적으로, 배열에 더 많은 안테나가 추가될수록 피크 이득은 더 높아지고 피크 주변의 각도 해상도는 더 좁아집니다.

위와 같은 그래프는 레이더 시스템이 매우 세밀한 스캔을 제공할 수 있음을 보여줍니다. 즉, 단일 객체에 대해 여러 레이더 측정을 수행할 수 있습니다. 각각의 각도에서의 스캔은 2D 이미지를 구성하는 데 사용될 수 있습니다.
카메라와 같은 다른 센서와 함께 사용될 때, 레이더 이미징 시스템은 이제 매우 높은 정밀도로 객체의 움직임을 식별하고 추적할 수 있습니다. 이는 왜 직접 카메라를 사용하여 객체를 추적하지 않는지, 또는 왜 라이다를 사용하지 않는지에 대한 의문을 제기합니다.
왜 카메라와 라이다를 사용하지 않나요?
기술적으로, 라이다로도 같은 유형의 스캔을 할 수 있지만, 라이다 시스템은 비슷한 MIMO 레이더 시스템에서 찾을 수 있는 것보다 더 복잡한 광학 하위 시스템을 요구합니다. 이것이 우리가 비전 시스템에서 라이다로, 그리고 이제 레이더 사용으로 전환한 이유입니다.
레이더 시스템은 5D 이미지(2D 이미지의 x와 y 좌표, 범위, 방향, 속도)를 형성하는 데 사용될 수 있으며, 반복된 레이더 스캔을 통해 다른 시간 단계에서 즉시 새로운 이미지를 생성할 수 있습니다. PCB에 더 많은 안테나를 탑재하면 라이다와 경쟁할 수 있는 지속적으로 증가하는 해상도를 얻을 수 있습니다.
카메라는 어떨까요? 단일 비디오 클립에서 객체 식별, 분류, 범위, 방향, 속도를 추론하려고 시도하는 것은 매우 데이터 집약적입니다. 정확한 식별을 위해 필요한 프레임 수가 N에 비례한다면, 모든 5개의 자유도에 대해 훈련하기 위해 필요한 훈련 데이터의 양은 N5에 비례합니다. 이것이 비현실적이라는 것은 명백해야 합니다, 특히 레이더가 이러한 자유도 중 3개를 직접 측정하며 이미지 데이터에서 추론할 필요가 없기 때문입니다.
높은 안테나 수의 또 다른 이유는 다중 객체 추적입니다. 이것은 비디오 스트림에서 범위, 방향, 속도를 추적하려고 시도할 때 교육 데이터셋 요구 사항으로 인해 매우 데이터 집약적인 또 다른 영역입니다. 단순히 카메라를 기반으로 한 2D 이미징 시스템으로는 할 수 없습니다. 반면, 레이더는 AI 없이 직접 방향, 범위, 속도를 측정할 수 있습니다.
높은 안테나 수를 가진 레이더 시스템은 배열 전체에 걸쳐 MIMO 기능을 구현할 수 있으며, 이를 통해 여러 객체를 직접 측정을 통해 식별하고 추적할 수 있습니다. 즉, 첫 단계에 AI 추론이 필요하지 않습니다. 객체가 식별되면, 레이더는 기본 신경망을 사용한 표준 컴퓨터 비전으로 객체의 고해상도 스캔을 식별/분류를 위해 수행할 수 있습니다.
이 배열은 얼마나 큰가요?
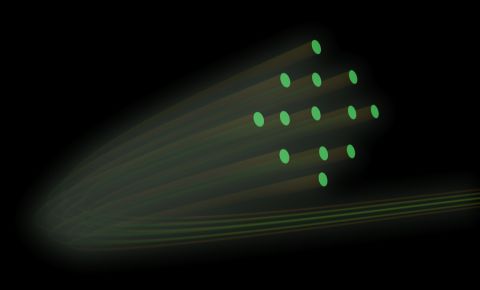
앵귤러 해상도 그래프의 유형은 가상 배열로 약 100개 이상의 안테나를 사용하여 생성될 수 있습니다. 예를 들어, 이는 단일 PCB 상의 10 x 10 Tx/Rx 배열의 패치 안테나로 달성될 수 있습니다. 이러한 패치 안테나 배열은 아래 이미지와 유사하게 보이며, 높은 수의 방사체가 동일한 레이어에 배치됩니다.

위에서 언급한 고급 레이더 시스템의 AI 추론 요구 사항과 리다의 복잡한 광학 시스템 제거 또는 비디오 시스템의 집중적인 훈련 요구 사항을 고려할 때, 고해상도 레이더가 높은 안테나 수를 가지는 것이 유리한 이유가 분명해야 합니다. 로봇, 드론, 차량 또는 객체 추적에서 이점을 얻는 다른 시스템 중 하나를 구축하려는 경우, 일부 표준 PCB 설계 규칙이 적용됩니다. 대규모 배열의 배치와 라우팅에 대해 자세히 알아보려면 다음 자료를 참조하십시오:
자동차 레이더를 넘어서?
위에서 언급했듯이, 높은 안테나 수를 가진 레이더 시스템에 적용되는 다른 중요한 영역이 있습니다. 이 시스템들은 주변 세계에 대한 더 큰 인식을 가지기 위해 카메라와 마이크로폰을 포함한 다른 감지 시스템과의 통합이 필요합니다. 모션 추적 기능과 제스처 인식을 가진 다음 로봇 시스템은 레이더를 사용하여 이루어질 것이며, 오늘날 레이더 송수신기를 위한 많은 집적 회로 옵션 덕분에 훨씬 쉽습니다.
최첨단 RF 시스템을 구축하고 싶을 때는 Altium Designer®의 완벽한 PCB 설계 기능과 세계적 수준의 CAD 도구를 사용하세요. 오늘날의 융합된 환경에서 협업을 구현하기 위해, 혁신적인 기업들은 Altium 365™ 플랫폼을 사용하여 설계 데이터를 쉽게 공유하고 프로젝트를 제조 단계로 넘기고 있습니다.
Altium Designer와 Altium 365로 가능한 것의 표면만 긁어본 것입니다. 오늘 Altium Designer + Altium 365의 무료 체험을 시작하세요.

작성자 정보
Related Technical Documentation
관련 자료
설계부터 출시까지, 마찰 없이
- 검토를 올바른 버전에 연결하세요
- 인계 과정의 혼선과 재작업을 줄이세요
- 소싱 및 릴리스 위험을 더 일찍 파악하세요
- 혼자 작업하고, 필요할 때 공유하세요
시작하기
Thank you, you are now subscribed to updates.

