










Sygnały PCB: Kluczowe elementy projektowania PCB wysokiej prędkości







Rozumienie wyzwania
Celem tego artykułu jest wprowadzenie do kluczowych elementów projektowania wysokich prędkości, a następnie omówienie, jak każdy z tych elementów jest rozwiązywany w Altium Designer. Artykuł ten nie ma na celu dostarczenia kompletnego omówienia projektowania wysokich prędkości; w tym zakresie istnieje wielu doświadczonych i uczonych projektantów oraz inżynierów, którzy napisali doskonałe prace referencyjne i książki na ten temat. Zapoznaj się z sekcją Referencje dla linków do tych autorów oraz prac użytych podczas badań do tego artykułu.
Więc co dokładnie sprawia, że projekt PCB jest projektem wysokich prędkości? Oczywiście chodzi o szybkie działanie, ale nie tylko o częstotliwość zegara używaną na płytce. Projekt uznaje się za projekt wysokich prędkości, gdy zawiera urządzenia o szybkich zboczach - urządzenia, które zmieniają stan tak szybko, że przejście jest zakończone zanim sygnał może przemieścić się wzdłuż trasy i dotrzeć do docelowego pinu. W tej sytuacji sygnał może być odbity z powrotem do pinu źródłowego, pogarszając lub niszcząc oryginalne dane sygnału. Sygnał o szybkim zboczu może również promieniować z trasy i sprzęgać się z sąsiednimi trasami, lub promieniować dalej i stać się zakłóceniem elektromagnetycznym (EMI), co skutkuje niezgodnością produktu z obowiązkowymi normami emisji.
Gdy sygnał ma szybkie zbocza, zmienia to sposób, w jaki energia przemieszcza się przez trasowanie. W obwodzie, gdzie szybkość zmian zboczy jest wolna, można myśleć o energii płynącej przez trasowanie jak o wodzie przepływającej przez rurę. Tak, pewna ilość energii jest tracona z powodu tarcia, gdy woda jest przepychana przez rurę, ale zasadniczo większość z niej dociera na drugi koniec. Dla obwodu DC lub o niskiej częstotliwości przełączania można obliczyć oporność trasy i upewnić się, że ilość energii traconej po drodze nie wpływa na wydajność obwodu.
Nie jest to takie proste w projektowaniu wysokich prędkości, ponieważ oprócz energii przepływającej jako elektrony przez miedziane ścieżki, w przypadku szybko przełączającego się sygnału, część tej energii podróżuje również jako energia elektromagnetyczna wokół miedzianych ścieżek. Teraz nie projektujesz już ścieżek miedzianych dla elektronów; projektujesz serię linii transmisyjnych wbudowanych w płytkę drukowaną.
Jak długo jest za długo?
W miarę zwiększania prędkości przełączania krawędzi, energia podróżująca przez trasę zachowuje się inaczej. Nie przemieszcza się już jak woda w rurze. Zamiast tego, większość energii koncentruje się na samym powierzchni trasy (znane jako efekt skórny), z częścią energii podróżującą faktycznie jako promieniowanie elektromagnetyczne. Nie przemieszczając się przez faktyczny przewodnik, ta energia elektromagnetyczna podróżuje przez materiał otaczający trasę. Podobnie jak ciągnięcie nogi przez wodę, gdy energia podróżuje w ten sposób, sygnał faktycznie zwalnia. Teraz to właściwości materiału wokół trasy dyktują, jak szybko sygnał podróżuje i jak bardzo jego przybycie zostanie opóźnione.
Więc kiedy to staje się problemem, czas potrzebny na propagację sygnału wzdłuż trasy do docelowego pinu? Podobnie jak fala uderzająca w ścianę, gdy sygnał dociera do docelowego pinu wejściowego, część energii w sygnale jest odbijana z powrotem w kierunku pinu źródłowego. Jeśli ta odbita energia wróci do pinu źródłowego, podczas gdy krawędź oryginalnego sygnału nadal się zmienia, oryginalny sygnał będzie wystarczająco silny, aby zdominować odbicie, gdy kończy swoje przejście i twój sygnał będzie w porządku. Ale jeśli przejście krawędzi zostanie zakończone zanim odbita energia wróci, jak echo w kanionie, ta odbita energia będzie wchodzić w interakcję z oryginalnym sygnałem i zmieniać go, być może na tyle, że nie będziesz mógł rozpoznać, co właściwie zostało wykrzyczane do kanionu.
Podsumowując, gdy czas podróży wzdłuż tej trasy w obie strony jest równy lub dłuższy niż czas narastania sygnału, integralność tego sygnału jest wątpliwa, a twoja konstrukcja staje się teraz konstrukcją wysokich prędkości! Długość tej trasy określa się jako krytyczną długość - trasy krótsze niż ta nie powinny doświadczać problemów z integralnością sygnału, podczas gdy trasy dłuższe niż ta mogą.
Aby przeanalizować swój projekt, powszechnie stosowaną zasadą jest reguła 1/3 czasu narastania, która mówi, że jeśli trasa jest dłuższa niż 1/3 czasu narastania, mogą wystąpić odbicia. Na przykład, jeśli pin źródłowy ma czas narastania 1 nSec, wtedy trasa dłuższa niż 0,33 nSec - co odpowiada około 2 calom w FR4 - musi być traktowana jako linia transmisyjna i zatem jako kandydat do problemów z integralnością sygnału.
Reguła 1/3 Czasu Narastania:
Prędkość, z jaką energia elektryczna może podróżować wzdłuż trasy, znana jest jako prędkość propagacji i może być zdefiniowana jako:
Vp= C / √εR
gdzie:
Vp = Prędkość Propagacji
C = Prędkość Światła (11.80285 cali/nSec lub 299.792458 mm/ns)
εR = Stała Dielektryczna
Zakładając, że stała dielektryczna εR FR4 wynosi 4, prędkość sygnału w FR4 jest dana jako:
Vp(FR4) = (299,792458 / √4) mm/ns
=149,89 mm/ns (ok. 6 cali/ns)
Stosując 1/3 zasadę kciuka dotyczącą czasu narastania, efekty linii transmisyjnej zaczną się pojawiać, gdy:
LR ≥ (TR / 3) × (C / √εR)
gdzie:
LR = Długość trasy (w mm)
TR = Czas narastania sygnału (w ns).
Dla FR4 długość trasy, przy której należy rozważyć efekty linii transmisyjnej, można obliczyć jako:
LR ≥ TR × 49,965 mm
Jeśli TR = 1nS
LR ≈ 50mm (2 cale)
Jeśli TR = 100pS
LR ≈ 5mm (0,2 cala)!! Na płytce z sygnałami przełączającymi się z takimi prędkościami, większość tras będzie liniami transmisyjnymi.
Dopasowanie impedancji
Skoro nie jest możliwe, aby wszystkie trasy były krótsze niż krytyczna długość, jak zapewnić, że informacje zakodowane w twoich sygnałach są odbierane poprawnie, a nie zatarte przez odbicia? Robisz to, minimalizując ilość energii, która jest odbijana z powrotem. Idealnie chciałbyś, aby cała energia, która dociera do docelowego pinu wejściowego, przeszła do tego komponentu, a żadna nie została odbita z powrotem. Jak więc to osiągnąć?
Aby zapobiec odbiciom, musisz myśleć o trasie i projektować ją tak, jakby była linią transmisyjną. Dlaczego? Ponieważ linia transmisyjna ma specjalne zachowanie, że gdy jest zakończona impedancją taką samą jak jej własna impedancja, żadna energia nie jest odbijana. Teraz masz metodę obsługi tych tras, które są dłuższe niż krytyczna długość; prowadź je jako linię transmisyjną. Oznacza to, że prowadzisz je tak, aby miały określoną impedancję, a następnie kończysz je tą samą impedancją.
Impedancja trasy jest określona przez wymiary trasy (szerokość i wysokość rury) oraz właściwości i wymiary otaczających materiałów, które będą otaczającym powietrzem lub warstwami dielektrycznymi. Aby funkcjonować jako linia transmisyjna, warstwa przylegająca do warstwy sygnałowej musi być warstwą płaską. Poprzez staranne rozmieszczanie warstw w stosie warstw i obliczanie wymiarów i właściwości, można osiągnąć określoną impedancję dla trasy. To podejście do trasowania jest określane jako trasowanie z kontrolowaną impedancją, gdzie docelowa impedancja jest utrzymywana stała, a wymiary i właściwości materiału są wybierane i dostosowywane, aby to osiągnąć.
Osiągnięcie kontrolowanej impedancji PCB nie jest możliwe tylko przez trasowanie. Istnieją dwa elementy tej układanki - kontrolowanie impedancji trasowania oraz dopasowanie tej impedancji do pinów w sieci. Osiągnięcie tego dopasowania często wymaga dodania komponentów terminujących. Terminacje mogą być dodane blisko pinu źródłowego lub blisko pinu docelowego. Dobrym podejściem do ustalenia, czy szybka sieć potrzebuje terminacji, jest analiza projektu za pomocą symulatora integralności sygnału. W przeciwieństwie do symulatora obwodów, który modeluje i symuluje zachowanie i interakcje komponentów, symulator integralności sygnału modeluje zachowanie trasowania i jego interakcję z pinami komponentów. Dla symulacji integralności sygnału komponenty są modelowane tylko pod kątem charakterystyk I/O ich pinów.
Narzędzie analizy integralności sygnału musi:
- Identyfikować sieci, które mogą mieć nieakceptowalne poziomy odbić (dzwonienia)
- Przewidywać potencjalne poziomy odbić sygnału i przeplotu jako przebiegi falowe
- Umożliwiać analizę co-jeśli potencjalnych komponentów terminujących i pomagać w wyborze odpowiednich komponentów terminujących
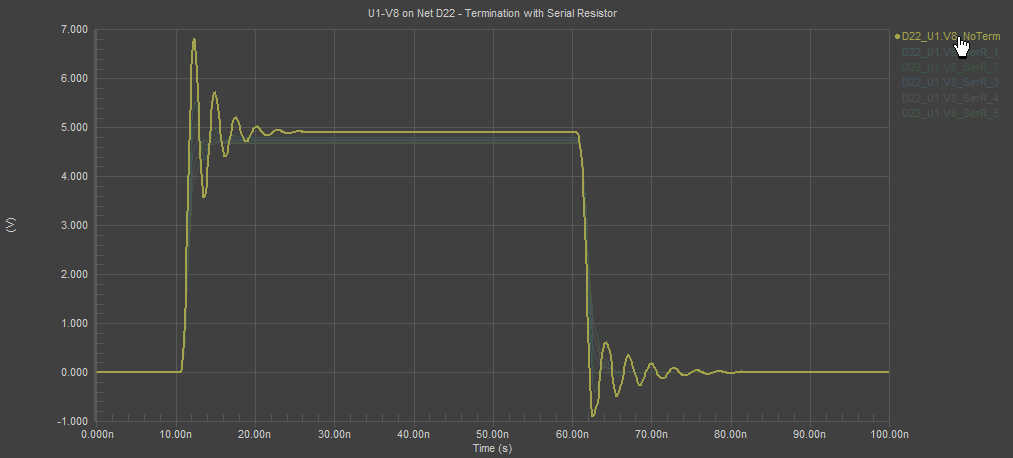

Seria nakładających się na siebie przebiegów falowych, które reprezentują zachowanie sieci poddanej analizie dla zakresu możliwych wartości terminacji. Po lewej jest niezaterminowana, po prawej z teoretycznym terminatorem szeregowym 40Ω.
Gdzie płynie energia zwrotna?
Ale to jeszcze nie wszystko (czyżby Moore?). Energia elektryczna płynie tylko wtedy, gdy istnieje zamknięty obwód, więc energia płynąca wzdłuż trasy sygnału musi również mieć ścieżkę powrotną. Ta ścieżka powrotna jest zwykle zapewniona przez trasowanie masy, które musi zapewnić ścieżkę powrotną dla wszystkich sygnałów w projekcie. Istnieje interesujące zjawisko, które występuje przy sygnałach o szybkich zboczach przełączania. Powracająca energia sygnału chce płynąć z powrotem tą samą krętą i zakręconą ścieżką, którą trasa sygnału przebiegała przez płytę. Dlaczego? Ponieważ jest to ścieżka o najmniejszej impedancji dla tego sygnału. Mimo że mogłaby płynąć najkrótszą drogą od komponentu docelowego z powrotem do komponentu źródłowego, nie robi tego.
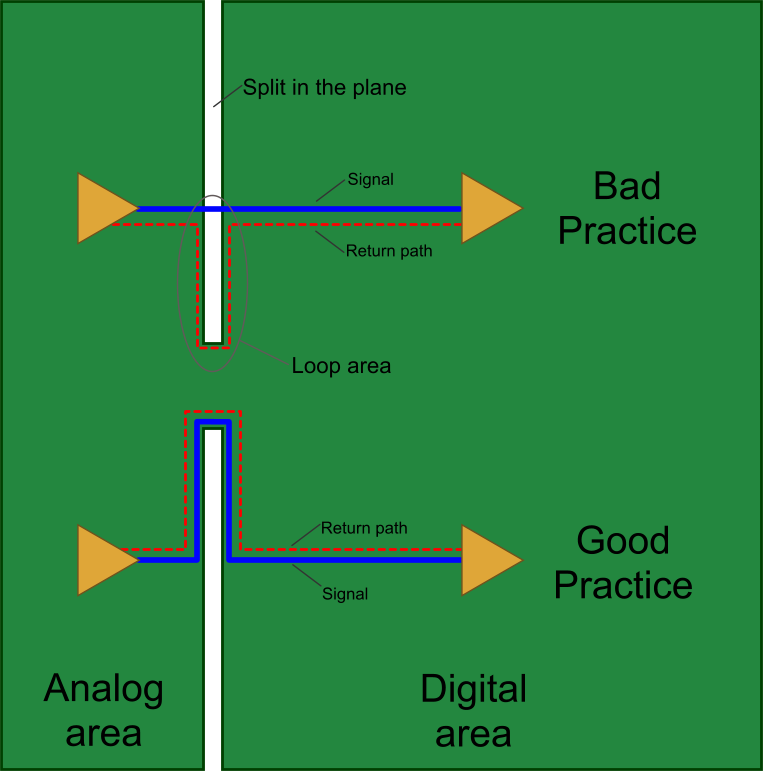
Gdy sygnał o wysokiej prędkości przekracza rozdzielność w płaszczyźnie, tworzy się pętla, powodując, że sygnał generuje EMI.
Więc oprócz myślenia o ścieżce routingu dla sygnału, musisz również zapewnić nieprzerwaną ścieżkę dla prądu powrotnego bezpośrednio pod trasą sygnału. Jeśli energia powrotna musi zboczyć spod ścieżki sygnału, aby ominąć przeszkodę, taką jak otwór w płytce (przerwa), wtedy tworzy się pętla. Pętla to luka między dwoma ścieżkami, patrząc w dół na płytę, a obszar tej pętli jest proporcjonalny do ilości energii, która teraz będzie promieniowana przez ten sygnał. Jeśli w płycie jest nieunikniona przerwa, rozważ przekierowanie ścieżki sygnału tak, aby dostosować się do ścieżki powrotnej, ponieważ zmniejszenie obszaru pętli jest zwykle uważane za ważniejsze niż minimalizacja długości trasy.
Ważnym punktem, o którym należy pamiętać, jest to, że ścieżka powrotna przebiega przez najbliższą płytę zasilającą, która może nie być płytą masową. Jeśli ścieżka powrotna przebiega przez płytę zasilającą zamiast płyty masowej, energia powrotna ostatecznie dostanie się do ziemi przez kondensatory sprzęgające, które są najbliżej pinów źródła i celu. Jeśli polegasz na płycie zasilającej, aby zapewnić ścieżkę powrotną, starannie rozważ lokalizację kondensatorów sprzęgających w pobliżu tych pinów, aby zminimalizować rozmiar ewentualnie tworzonej pętli.
Pary różnicowe
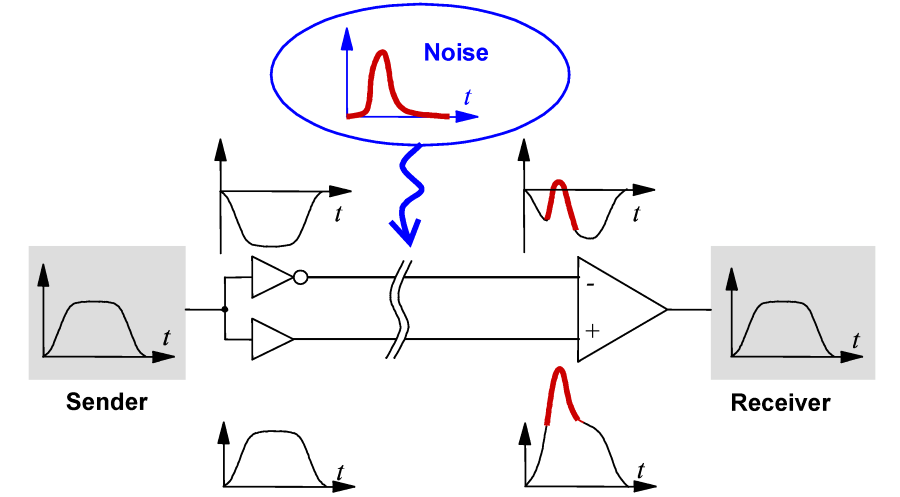
Nowoczesne technologie sygnalizacyjne, takie jak pary różnicowe, pomagają zmniejszyć potrzebę wysokiej jakości płaszczyzny powrotnej poprzez prowadzenie ścieżki sygnału i ścieżki powrotnej razem jako parę, zapewniając, że są one ściśle sprzężone zarówno pod względem separacji, jak i całkowitej długości. Oprócz silnego sprzężenia i zmniejszonego polegania na wysokiej jakości odniesieniu do ziemi, pary różnicowe oferują kolejną dużą zaletę - doskonałą odporność na zakłócenia.
Energia elektromagnetyczna, która porusza się wzdłuż trasy jako część każdego sygnału, nie łączy się w całości z docelowym pinem wejściowym; część z niej ucieka i zakłóca sygnały sąsiednie. Ta uciekająca energia staje się tym, co nazywamy zakłóceniami elektromagnetycznymi (EMI), a gdy łączy się z sąsiednim sygnałem, tworzy to, co nazywamy przesłuchem. Pary różnicowe są dobre w radzeniu sobie z przesłuchem, ponieważ emitowana energia łączy się zarówno z sygnałem wychodzącym, jak i sygnałem powrotnym, tworząc to, co nazywamy szumem wspólnym (szum jest wspólny dla obu ścieżek sygnałowych). Gdyby był tylko jeden sygnał, ten przesłuch dodawałby się do tego sygnału i go zniekształcał. Ale piny wejściowe pary różnicowej są zaprojektowane tak, aby patrzeć na różnicę pomiędzy pinami w parze, i dlatego są w stanie odrzucić szum wspólny.
Te dwie cechy - zdolność do dokładnego dopasowania długości sygnału i jego ścieżki powrotnej, oraz zdolność do wytrzymania efektów przesłuchu - czynią pary różnicowe preferowanym rozwiązaniem dla sygnałów wysokiej prędkości, które mogą obsługiwać prędkości transmisji danych przekraczające 10 Gb/s na PCB.
Pary różnicowe zapewniają silną odporność na zakłócenia i zmniejszają zależność od wysokiej jakości ścieżki powrotnej przez płaszczyznę. Ta zmniejszona zależność od płaszczyzny uziemienia jest bezpośrednio związana z stopniem, w jakim długości par są dopasowane i pozostają konsekwentnie sprzężone - w miarę jak dopasowanie długości lub sprzężenie maleje, zależność sygnałów od płaszczyzny wzrasta. Większość ekspertów zgadza się, że dopasowanie długości jest kluczowym wymogiem dla par różnicowych.
A co z przelotkami?
Jeśli staranne kontrolowanie impedancji i zapewnienie wysokiej jakości ścieżki powrotnej to pierwsze dwa boki trójkąta projektowania wysokich prędkości, przelotki są trzecim bokiem tego trójkąta. Przy niskich częstotliwościach przelotka ma niewielki wpływ na jakość sygnału i może być używana bez rozważania jej wpływu na wydajność obwodu. Jednakże, jeśli twoje projektowanie funkcjonuje jako projektowanie wysokich prędkości, przelotki mogą wpływać na wydajność obwodu i jakość sygnału.
Przelotki pojawiają się zarówno jako dyskontinuacje pojemnościowe, jak i indukcyjne, więc ich obecność wpływa na impedancję trasy sygnału. Oprócz wpływu na impedancję, nieużywana długość beczki przelotki prezentuje się jako sztub, który może tworzyć odbicia. Badania ilościowe pokazały, że ich wpływ można zmniejszyć, adresując każdy z następujących obszarów:
- Zmniejszenie rozmiaru pierścienia okołootworowego, gdzie trasa sygnału łączy się z przelotką.
- Usuwanie nieużywanych pierścieni okołootworowych na warstwach, do których przelotka nie jest podłączona.
- Zwiększenie odstępu od beczki przelotki do sąsiednich warstw płyt.
- Umieszczanie przelotek zszywających obok przelotek sygnałowych, aby zapewnić ścieżkę dla prądu powrotnego sygnału, umożliwiając mu zmianę warstw płyt.
- Staranne umieszczanie kondensatorów sprzęgających obok przelotki, gdy do przenoszenia prądu powrotnego sygnału będzie używana inna warstwa napięciowa.
- Usuwanie nadmiarowych części przelotek (dodatkowej, nieużywanej długości przelotki, która wystaje poza warstwę, z której trasa sygnału uzyskuje dostęp do przelotki). Jest to realizowane poprzez:
- projektowanie przelotek i staranne przypisanie warstw, aby dostosować się do procesu fabrykacji, oraz
- wiercenie z kontrolowaną głębokością (wiercenie zwrotne) w celu usunięcia nieużywanej sekcji beczki przelotki.
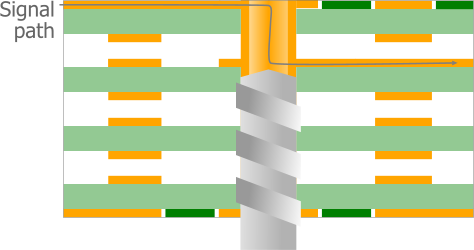
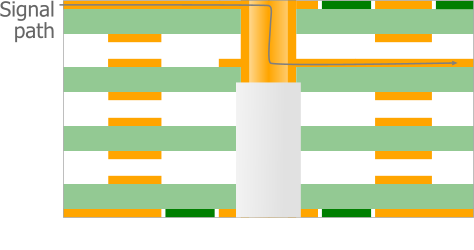
Używając procesu wiercenia z kontrolowaną głębokością, często określanego jako wiercenie zwrotne, można usunąć nieużywane beczki przelotek.
Innym podejściem do minimalizacji wpływu przelotek w projektach wysokich prędkości jest użycie mikroprzelotek. Mikroprzelotka to mała przelotka. Standardy IPC (IPC/JPCA-2315 i IPC-2226) definiują mikroprzelotki jako ślepe lub zakopane przelotki o średnicy równej lub mniejszej niż 6 mils (0,15 mm). Średnica 6 mils jest graniczną wartością dla wiercenia mechanicznego, więc mikroprzelotki są zazwyczaj wiercone laserowo. Stosuje się również hybrydowe techniki modyfikacji laserowej + kontrolowanego głębokościowego wiercenia mechanicznego jak opisano w tym dokumencie, co oferuje zalety w produkcji.
Mikroprzelotki oferują szereg zalet:
- Zmniejszone pasożytnicze elementy (rzędu jednej dziesiątej przelotki wierconej), co skutkuje niższą indukcyjnością.
- Mniejsze geometrie, co skutkuje mniejszym pierścieniem wokół przelotki.
- Zmniejszony rozmiar wydmuchu na warstwach płaszczyzn, przez które przechodzą.
- Usunięcie lub zmniejszenie długości wystającej części. Ponieważ są konstruowane jako część procesu układania warstw podczas produkcji, mogą łączyć określone warstwy początkowe i końcowe. Chociaż nie mogą łączyć dowolnej pary warstw, staranne wybór warstw sygnałowych używanych dla sygnałów wysokiej prędkości może zapewnić, że te warstwy mają dostęp do warstwy początkowej/koncowej mikroprzelotki.
Odpowiednie projektowanie via jest ważnym składnikiem procesu projektowania szybkich płyt. Możliwości połączeń warstwowych via są dyktowane przez proces fabrykacji płyty, co czyni wybór procesu fabrykacji i wiercenia równie ważnym, co określenie stylu via i układu warstw.
Crosstalk
Ponieważ część energii w sygnale wysokiej prędkości przemieszcza się przez materiał otaczający trasę, nieuniknione jest, że część tej energii zostanie sprzężona z sąsiednimi trasami. Zjawisko to, nazywane przeplotem, degraduje jakość tego sygnału. W języku integralności sygnału, sygnał, który emituje energię, określany jest jako agresor net, a sygnał, który odbiera energię przeplotu, jest określany jako ofiarą net. Jak więc zmniejszyć ilość energii uciekającej z agresora, i jak zmniejszyć ilość tej energii sprzężonej z ofiarą? Podstawowe podejście polega na zmniejszeniu ilości energii uciekającej z trasy agresora poprzez dopasowanie impedancji i poprawne projektowanie ścieżki powrotu sygnału, oraz na trzymaniu potencjalnych sieci ofiar z dala od agresorów.
Sygnały zegarowe i inne sygnały okresowe są głównymi źródłami przeplotu w projekcie. Często stosowaną zasadą jest zapewnienie, aby potencjalni agresorzy, tacy jak zegary, byli oddzieleni od potencjalnych ofiar trzykrotnością szerokości trasowania (mierzone od środka do środka). Jest to znane jako reguła 3-W. Lub w terminach od krawędzi do krawędzi, separacja musi wynosić nie mniej niż dwa razy szerokość trasowania. Jest to duża odległość, więc będziesz musiał być selektywny co do sieci, do których jest stosowana. Wysokie zagrożenie agresorami, takimi jak zegary, to jedna grupa. Drugą główną grupą do rozważenia są bardziej wrażliwe potencjalne ofiary, takie jak pary różnicowe; ta grupa również korzysta z separacji pary do innego sygnału 3-W.
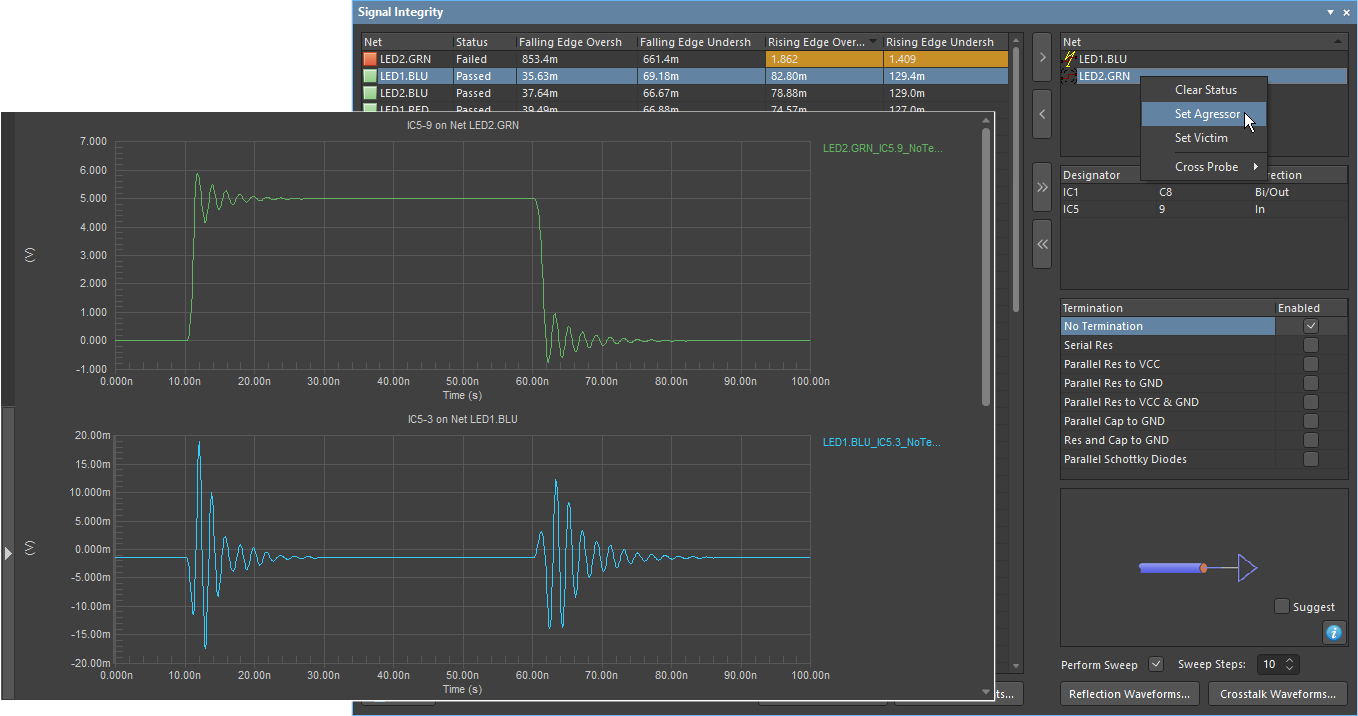
Przewidywane dzwonienie na niezakończonej trasie agresora (zielona fala) i wynikający z tego przeplot w sąsiedniej trasie ofiary (niebieska fala). Zauważ, że każdy wykres ma inną skalę napięcia.
Tańcząc w czasie
Na koniec, istotny jest czas, jaki sygnał potrzebuje, aby dotrzeć do swojego docelowego pinu wejściowego. Ogólnie rzecz biorąc, sygnał nie istnieje w izolacji. Działa w harmonii z wieloma innymi sygnałami. Prostym przykładem mogłoby być 8 bitów w bajcie danych. Nie tylko cały bajt musi dotrzeć w wyznaczonym czasie, ale wszystkie bity w bajcie muszą również dotrzeć razem. Czas, który sygnał potrzebuje, aby przebyć drogę od wyjścia do wejścia, określa się jako czas przelotu, a wszelkie różnice w czasach przybycia bitów określa się jako rozbieżność sygnału.
Kluczowe czynniki wpływające zarówno na czas przelotu, jak i rozbieżność, to:
- Długość tras sygnałowych, tj. jak daleko sygnały muszą podróżować.
- Materiały, przez które sygnały podróżują; wpływa to na szybkość podróży sygnałów.
Zarządzanie tym wymaga uwzględnienia:
- Umieszczanie komponentów - dobre rozmieszczenie komponentów jest kluczowym elementem udanego projektu wysokich prędkości. Użyj długości Manhattan, aby kierować początkowe rozmieszczenie różnych komponentów, które wymagają podobnych długości tras, na przykład urządzeń pamięci DDR3 skonfigurowanych w topologii T-branch.
- Wybór materiału - materiał, z którego wykonana jest płyta PCB, jest krytycznym czynnikiem w projektowaniu wysokich prędkości. FR4 służył branży PCB dobrze przez dziesięciolecia, ale jego użycie staje się ograniczającym czynnikiem w projektach wysokich prędkości, ponieważ niejednorodna stała dielektryczna FR4 tworzy skośność. Materiał jest bardziej omówiony w następnej sekcji.
- Ogólna długość trasy - oprócz wpływu na czas przelotu, ogólne długości są również ważne podczas trasowania zestawów powiązanych sieci. Na przykład, wymagania czasowe DDR określają, że trasa zegara jest dłuższa niż trasy adresu i kontroli. Te wymagania są zarządzane przez zasady projektowania długości.
- Zgodność długości tras - skośność jest zarządzana przez dopasowanie długości tras. To najdłuższa trasa w zestawie sygnałów określa długość trasy dla każdej sieci w tym zestawie. Długości są dopasowywane przez definiowanie zasad projektowania Dopasowanych Długości, a następnie wydłużanie każdej krótszej trasy, aby dopasować się do określonej długości.

Pary różnicowe - długości są dopasowane w obrębie par, jak również między parami (zdjęcie dzięki uprzejmości FEDEVEL Open Source, www.fedevel.com).
Płytka
Wszystko to dzieje się na płytce drukowanej. Od kiedy zostały one po raz pierwszy stworzone w latach 40., skromna PCB przeszła ogromne poziomy udoskonalenia w technologii fabrykacji i materiałach. Doprowadziło to do ogromnych redukcji rozmiaru cech, w tym trasowania i przelotek. Ścieżki nie są już produkowane o szerokości 20 mils. Teraz mogą być tak małe jak 2 mils; a mała przelotka to już nie 30/18 mil (ląd/otwór) - to jest 12/6 mil. Nowa nazwa została stworzona, aby opisać projekty używające cech tak małych - High-Density Interconnect (techniki HDI). Chociaż kosztuje więcej, aby stworzyć mniejsze cechy używane na płytach HDI, ich mniejszy rozmiar oznacza, że gotowy projekt może używać mniej warstw, mieć krótsze trasy i poprawioną integralność sygnału, co ostatecznie może skutkować płytą, która może nie kosztować więcej do wyprodukowania (ale może być znacznie trudniejsza do testowania i naprawy).
Materiały
Duża część wyzwania związanego z projektowaniem wysokich prędkości polega na zarządzaniu medium, przez które podróżują sygnały. Tradycyjny FR4 od dziesięcioleci dostarczał taniego i skutecznego materiału podłoża płytki, ale niejednorodna struktura włókna szklanego osadzonego w żywicy staje się ograniczającym czynnikiem dla projektów wysokich prędkości. Żywica ma inny stałą dielektryczną (≈3) niż włókno szklane (≈6), a ponieważ włókno szklane jest tkane i posiada przerwy w tkaninie, sygnał napotyka zmieniającą się stałą dielektryczną w miarę przemieszczania się przez płytę. Z tego powodu dostępna jest gama materiałów FR4. Lepsze materiały mają ściślejszą strukturę tkaniny, co daje bardziej jednolitą stałą dielektryczną. Stała dielektryczna FR4 zmienia się również wraz z temperaturą o nawet ± 20%.
Dostępne są lepsze materiały do produkcji PCB, takie jak teflon czy ceramika, ale wiążą się one z wyższymi kosztami. Materiał, z którego wykonana jest płyta, musi być rozważony i wybrany na wczesnym etapie procesu projektowania PCB we współpracy z producentem. Aby zrównoważyć wybór materiału z kosztami materiału, wielu producentów PCB pozwala na mieszanie materiałów, tak aby drogie materiały były używane tylko dla warstw, które przenoszą sygnały wysokiej prędkości.
Warstwy
Podobnie jak wiele aspektów projektowania płytek drukowanych, wyznaczenie optymalnej liczby warstw jest tak samo sztuką, jak i matematyką. Rozpraszanie i ucieczka trasowania gęstych BGA silnie wpływa na liczbę warstw trasowania. Wykonanie testowego rozpraszania i trasowania ucieczkowego, aby sprawdzić najgęstsze BGA w projekcie, może pomóc zweryfikować, czy jest wystarczająca liczba warstw sygnałowych. Innym podejściem, rekomendowanym przez Barry'ego Olneya z In-Circuit Design, jest przeprowadzenie testowego autoroutingu na płytce. Sugeruje on, że jeśli ukończy przynajmniej 85% tras, płytka powinna być możliwa do ręcznego trasowania przy użyciu obecnego układu warstw.
Dodawanie i przypisywanie warstw odbywa się parami. Ogólnie, albo masz parę warstw płaszczyzn dla każdej pary warstw sygnałowych, albo parę warstw płaszczyzn dla każdych dwóch par warstw sygnałowych. Więc płyta czterowarstwowa będzie miała dwie płaszczyzny i dwie sygnałowe; sześciowarstwowa będzie miała dwie płaszczyzny i cztery sygnałowe, ośmiowarstwowa będzie miała cztery płaszczyzny i cztery sygnałowe, a dziesięciowarstwowa będzie miała cztery płaszczyzny i sześć warstw sygnałowych. Zauważ, że jest to tylko wytyczna; nadrzędnym celem jest zapewnienie, aby każda warstwa sygnału wysokiej prędkości była przyległa do warstwy płaszczyzny.
Nie wszystkie sygnały są sygnałami wysokiej prędkości, i nie wszystkie warstwy mogą być konfigurowane jako warstwy do trasowania sygnałów wysokiej prędkości, dlatego standardową praktyką jest przypisywanie i trasowanie sygnałów wysokiej prędkości na określonych parach warstw. Każda para warstw sygnałowych powinna mieć jedną warstwę przypisaną do trasowania pionowego, a drugą do trasowania poziomego, i należy tego przestrzegać jak najlepiej, aby zminimalizować przeplot między sąsiednimi warstwami. Para wysokiej prędkości może być umieszczona po jednej stronie warstwy płaszczyzny lub między dwoma warstwami płaszczyzn.
Grubość dielektryka między warstwami sygnałowymi wysokiej prędkości a warstwą odniesienia płaszczyzny będzie ustawiona tak, aby odpowiadała wymaganemu charakterystycznemu impedansowi; zazwyczaj będzie to mniej niż 10 mils (0,25 mm). Aby osiągnąć ogólną grubość płyty wymaganą ze względów mechanicznych, należy dostosować grubość warstwy dielektrycznej, która nie jest przyległa do warstwy sygnału wysokiej prędkości, na przykład środkowej warstwy rdzenia.
Podręcznik HDI obejmuje mapę technologii pakowania, która może być używana do wskazania, czy projekt można zrealizować przy użyciu tradycyjnego wiercenia mechanicznego, czy też prawdopodobnie będzie musiał wykorzystać strukturę High-Density Interconnect (HDI). Standardy IPC IPC/JPCA-2315 i IPC-2226 zawierają formuły, które mogą być użyte do obliczenia gęstości komponentów i okablowania, dostarczając cenne informacje, które można wykorzystać podczas dyskusji na temat liczby warstw i opcji stosu z producentem.
Możliwe układy warstw
Poniższa tabela pokazuje szereg możliwych układów warstw i przydziałów warstw. Układ par o wysokiej prędkości i par ogólnego przeznaczenia może być zmieniony, na przykład, jeśli projekt sześciowarstwowy/tylko z przelotami może mieć sygnały o wysokiej prędkości prowadzone na górnej warstwie, jest to dobra opcja, jeśli oznacza to, że sygnały o wysokiej prędkości nie muszą używać przelotów. Zachowaj każdą warstwę o wysokiej prędkości obok warstwy płaszczyzny, a grubości dielektryków otaczających te same dla warstw o wysokiej prędkości.
| 4-WARSTWOWY | 6-WARSTWOWY | 8-WARSTWOWY | 10-WARSTWOWY | 12-WARSTWOWY |
|---|---|---|---|---|
| Signal HS-H | ||||
| Signal HS-H | GND | |||
| Signal HS-H | GND | Signal HS-V | ||
| Signal H | GND | Signal HS-V | Signal H | |
| Signal V | GND | Signal HS-V | Signal H | GND |
| GND | Signal HS-V | GND | GND | Signal V |
| POWER | Signal HS-H | POWER | POWER | Signal H |
| Signal H | POWER | Signal H | Signal V | POWER |
| Signal V | GND | Signal HS-H | Signal V | |
| Signal V | GND | Signal HS-H | ||
| Signal HS-V | GND | |||
| Signal HS-V |
Zalecane układy warstw dla płyt 4, 6, 8, 10 i 12-warstwowych.
Zdefiniuj układ warstw na wczesnym etapie i zwróć szczególną uwagę na dostępne warstwy startowe/zakończeniowe dla przelotek.
Teraz, gdy rozumiesz wyzwania projektowania PCB wysokiej prędkości, dowiedz się więcej:
- Funkcje Altium Designer dla projektowania wysokiej prędkości
- Dokumentacja dotycząca bezpośredniego radzenia sobie z tymi wyzwaniami w Altium Designer
Powiązane zasoby
Related Technical Documentation
Spis treści
Od projektu do wydania, bez zbędnych przeszkód
- Powiąż przeglądy z właściwą wersją
- Ogranicz niejasności przy przekazywaniu i konieczność poprawek
- Wcześniej wykrywaj ryzyko związane z zaopatrzeniem i wydaniem
- Pracuj samodzielnie, udostępniaj w razie potrzeby
Rozpocznij
Thank you, you are now subscribed to updates.