




Modulation de largeur d'impulsion dans la conception d'alimentation électrique

At a Glance
Les signaux PWM sont utilisés pour contrôler la livraison de puissance moyenne dans les circuits de régulateurs à découpage.







Comme leur nom l'indique, les alimentations à découpage utilisent un commutateur à semi-conducteur (typiquement un MOSFET) pour piloter un composant magnétique, typiquement un transformateur ou une inductance. La sortie du circuit de puissance commuté est ensuite redressée et régulée pour fournir une sortie en courant continu (DC). Les alimentations à découpage sont populaires en raison de leur efficacité nettement supérieure par rapport aux alternatives non commutées telles que les régulateurs linéaires. Dans cet article, nous aborderons ce qu'est la commande PWM et comment l'utiliser.
Qu'est-ce que le PWM
La modulation de largeur d'impulsion (PWM), également connue sous le nom de modulation de durée d'impulsion (PDM), est une technique permettant de réduire la puissance moyenne dans un signal de courant alternatif (AC). La signification du PWM est effectivement de couper des parties de la forme d'onde pour réduire la tension moyenne sans affecter la fréquence de base du signal. Augmenter la période pendant laquelle la tension est 'éteinte' réduit la tension moyenne, d'où la puissance.
Lorsqu'elle est appliquée dans une alimentation ou un régulateur de puissance, la PWM est utilisée pour maintenir soit :
- Une sortie de courant constant avec une tension variable (contrôle en mode courant)
- Une tension constante avec un courant variable (contrôle en mode tension)
Plus de détails sont discutés ci-dessous. Si nous observons une forme d'onde dans le domaine temporel d'un signal MLI (Modulation de Largeur d'Impulsion), elle ressemblerait à la forme d'onde dans l'image suivante.
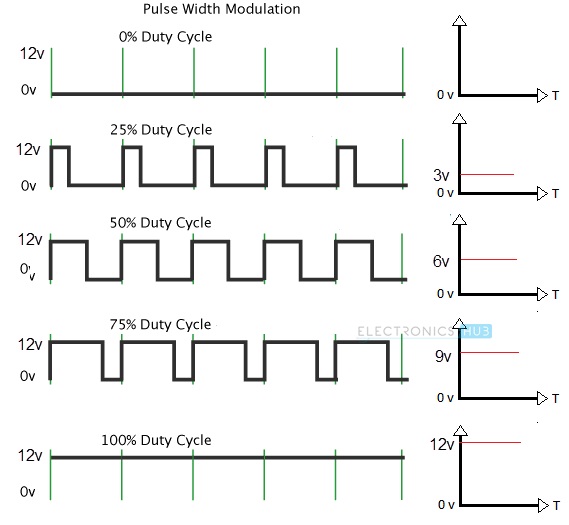
Source de l'image : ElectronicsHub
Utilisation du contrôle de sortie MLI
Les alimentations à découpage doivent mettre en œuvre une boucle de contrôle de rétroaction pour maintenir leur contrôle de tension de sortie MLI dans les limites requises sous des conditions de charge changeantes—la tension de sortie de l'alimentation est renvoyée à travers un amplificateur d'erreur pour fournir un signal de contrôle. La méthode de contrôle la plus courante est l'utilisation de MLI. La largeur d'impulsion du signal AC à l'entrée de l'alimentation est ajustée pour augmenter ou réduire l'énergie électrique, ce qui se traduit par un changement de la tension à la sortie de l'alimentation. Par exemple, augmenter la largeur d'impulsion d'entrée fait monter la tension de sortie, diminuer la largeur d'impulsion et réduire le contrôle de tension de sortie MLI. Ce mécanisme fournit un contrôle de rétroaction en boucle fermée de la tension de sortie.
Un problème à garder à l'esprit est qu'une forme d'onde AC typique a tendance à avoir des bords montants et descendants bénins. Les bords montants et descendants peuvent devenir plus abrupts lorsque le contrôle de l'alimentation par modulation de largeur d'impulsion (PWM) est appliqué, en particulier avec un cycle de travail plus petit. Les changements de tension soudains peuvent générer des transitoires, contribuant au bruit électromagnétique et causant de grands courants d'appel au sein du circuit PWM. De plus, des erreurs mineures dans le circuit de contrôle peuvent être amplifiées en erreurs de sortie significatives, pouvant entraîner une tension de sortie instable. Une solution standard est d'éviter la commutation abrupte on-off de la forme d'onde d'entrée et de limiter plutôt le taux de changement en utilisant une technique de compensation de pente.
Les techniques de contrôle en mode courant de crête (PCMC) offrent une solution simple pour le circuit d'alimentation par modulation de largeur d'impulsion (PWM), sauf pour les convertisseurs inducteur-inducteur-condensateur (LLC) qui nécessitent un contrôle en mode tension. Le contrôle de puissance PWM sera toujours un défi lorsque le cycle de travail approche de sa valeur maximale. Concevoir le circuit PWM pour éviter cette situation est toujours préférable à l'ajout de circuits de contrôle supplémentaires pour appliquer une compensation de pente afin de prévenir l'instabilité de sortie.
Considérations de Conception
Courants de Démarrage Transitoires
L'un des inconvénients des alimentations à découpage, particulièrement lorsqu'elles sont utilisées dans des alimentations isolées, est qu'un courant transitoire important peut être provoqué par la mise sous tension des éléments inductifs de l'alimentation. De plus, le courant initial n'est pas prévisible ; il variera selon le point exact du cycle AC où les éléments inductifs sont d'abord alimentés.
La réponse transitoire peut être facilement prédite dans une simulation SPICE. Vous n'avez pas toujours besoin d'un modèle exact du régulateur, juste d'un signal PWM qui contrôle les FETs et imite le temps de montée/descente du signal PWM réel dans le dispositif. Cela donne des résultats raisonnablement précis pour les pilotes de grille qui sont utilisés pour contrôler des FETs externes, comme dans un pont en H. Un exemple ci-dessous montre un cas où les passifs dans un convertisseur buck ont un ESR insuffisant, conduisant à une réponse sous-amortie qui est caractéristique d'un circuit LC pendant les premiers 500 ms de la mise sous tension.

Les circuits de commande basés sur la MLI (Modulation de Largeur d'Impulsion) peuvent intégrer une fonction de démarrage progressif qui peut contrôler la phase initiale de mise sous tension pour limiter l'énergie disponible pour le circuit MLI et limiter le courant d'excitation jusqu'à ce que l'alimentation atteigne un état stable. Essentiellement, cela produirait un allumage amorti de sorte que l'oscillation mentionnée ci-dessus ne se produise pas. Limiter le courant de surtension initial protège les composants et peut réduire les émissions associées au flux de courant transitoire.
De nombreux circuits intégrés régulateurs de puissance incluront cette fonctionnalité, qui sera accessible avec une broche sur le dispositif. Un exemple est le LTM8052 d'Analog Devices ; le temps de démarrage progressif sur ce dispositif est programmé en connectant un condensateur à la broche SS.

Protection contre les surintensités
Un avantage de la commande MLI est que la logique de détection de courant peut être utilisée pour désactiver l'alimentation électrique en coupant la MLI si le courant de sortie dépasse une limite définie. Cela offre un mécanisme de protection contre les surintensités simple à mettre en œuvre qui se réinitialise automatiquement une fois que le courant revient dans ses limites.
Gestion des faibles charges avec la Modulation de Fréquence d'Impulsion
L'un des principaux inconvénients d'un schéma de circuit d'alimentation à découpage PWM est son inefficacité inhérente à de très faibles charges. Dans des conditions sans charge, l'alimentation continuera d'engendrer des pertes dues au circuit de contrôle de l'alimentation. Cela peut poser problème pour les dispositifs alimentés par batterie qui fonctionnent pendant de longues périodes en mode veille, où l'efficacité de l'alimentation détermine la durée de vie de la batterie.
Une solution à cette situation est la Modulation de Fréquence d'Impulsion (PFM) à la place d'un schéma de circuit d'alimentation PWM. Ici, le cycle de travail de la forme d'onde AC reste inchangé, et le contrôle de la sortie de l'alimentation est réalisé par un changement de la fréquence de l'entrée AC.
Le principal problème avec la PFM est que la conception du filtrage du bruit devient beaucoup plus difficile en raison de la génération de bruit sur une plage de fréquences beaucoup plus large.
D'autres problèmes sont que le contrôle PFM générera une ondulation de tension de sortie significativement plus grande que le contrôle PWM et que le temps de réponse transitoire peut être considérablement plus long. Ces problèmes rendent la tâche du concepteur plus difficile si l'alimentation alimente des composants sensibles aux fluctuations de tension, en particulier les circuits intégrés.
Les puces d'alimentation sont désormais disponibles avec des circuits PWM à double mode intégrés et un contrôle PFM qui bascule automatiquement en fonction de la charge de sortie. Par conséquent, limiter le contrôle PFM aux conditions de faible charge minimisera, par définition, l'effet d'effets indésirables tels que le bruit émis et l'ondulation de tension.
Gérer les faibles charges avec la modulation par saut d'impulsion
Une autre technique pour gérer les conditions de faible charge consiste à éteindre la forme d'onde PWM pendant une courte période et à compter sur le condensateur de sortie de l'alimentation pour maintenir la tension de sortie pendant cette période. Ce processus de désactivation de la forme d'onde PWM est connu sous le nom de saut d'impulsion ou modulation par saut d'impulsion (PSM). Dans des conditions sans charge, la forme d'onde PWM ne nécessiterait qu'une activation intermittente pendant de courtes périodes pour compenser les pertes dans l'alimentation elle-même qui drainent le condensateur de sortie.
Un exemple montrant les formes d'onde dans un régulateur de puissance capable de PSM est trouvé ci-dessous. La fonction PSM élimine une impulsion PWM aux portes du FET sous des conditions définies dans le circuit interne du contrôleur. L'exemple ci-dessous provient du TPS61175 de Texas Instruments.

Conclusion
L'avantage principal de l'utilisation des circuits PWM réside dans les très faibles pertes de puissance grâce à leur haute efficacité, utilisant des fréquences très élevées pour une conception de circuit optimale. C'est également relativement économique à implémenter par rapport aux techniques comparables pour la conception d'alimentation électrique, avec la capacité de gérer de fortes charges. L'inconvénient principal est la complexité supplémentaire requise pour gérer les faibles charges. Cependant, la disponibilité de dispositifs intégrés qui combinent le contrôle PWM avec la gestion automatique des faibles charges a simplifié cette tâche pour le concepteur d'alimentation électrique.
Voulez-vous en savoir plus sur comment Altium Designer peut vous aider avec votre prochain design de PCB ? Parlez à un expert chez Altium.
A propos de l'auteur
Related Technical Documentation
Ressources associées
Table des matières
- Qu'est-ce que la MLI
- Utilisation de la commande de sortie MLI
- Considérations de conception
- Courants de démarrage transitoires
- Protection contre les surintensités
- Gestion des faibles charges avec la modulation de fréquence d'impulsion
- Gestion des faibles charges avec la modulation d'omission d'impulsion
- Conclusion
De la conception à la mise sur le marché, sans friction
- Gardez les revues liées à la bonne version
- Réduisez la confusion lors des transferts et les retouches
- Repérez plus tôt les risques liés à l’approvisionnement et à la mise en production
- Travaillez seul, partagez lorsque nécessaire
Commencer
Thank you, you are now subscribed to updates.

