







Почему передовые автомобильные радары используют так много антенн?

At a Glance
Продвинутые радарные системы автомобилей используют большие виртуальные антенные решетки для высокоточного изображения, дальнего действия и/или отслеживания нескольких объектов.







За последние два года я работал над почти дюжиной модулей радаров, в основном ориентированных на автомобильный рынок. Близкие по тематике области включают радары для дронов, радарные датчики для роботов и промышленных систем, радарное обнаружение жизненных признаков, отслеживание движений и жестов, а также продвинутые системы безопасности. Большой интерес с бизнес-точки зрения представляет автомобильная отрасль, где всё больше систем ADAS ищут лучшие способы сбора важных данных из окружающей среды.
Операционные цели этих систем сводятся к созданию систем, которые могут поддерживать автономные транспортные средства, а также делать автомобили в целом безопаснее. Однако, для этого радарные системы, работающие на очень высоких частотах, следуют двум тенденциям:
- Новые радары используют очень большое количество антенн, гораздо большее, чем использовалось бы в типичном автомобильном радарном модуле (см. здесь пример)
- Данные радара могут использоваться вместе с данными других датчиков для выявления дополнительных характеристик отслеживаемых объектов
Для всех, кто хочет разрабатывать инновационные системы в этой области, важно следовать этим рекомендациям по проектированию печатных плат, чтобы воспользоваться преимуществами большого количества антенн. Сначала мы рассмотрим, почему инновационные радарные системы используют так много антенн на малых площадях, и как должна быть структурирована печатная плата, чтобы воспользоваться этими продвинутыми возможностями.
Увеличение количества антенн расширяет возможности визуализации
Что происходит, когда мы имеем РЧ-систему с множеством расположенных рядом передающих и принимающих антенн, работающих одновременно? Радарные системы используют эту архитектуру с большим количеством совмещенных антенн для улучшения своих возможностей в следующих областях:
- Большее количество антенн = выше разрешение
- Большее количество антенн = большее усиление = большая дальность
- Большее количество антенн = шире поле обзора при сканировании
- Большее количество антенн = функциональность MIMO для отслеживания множества объектов
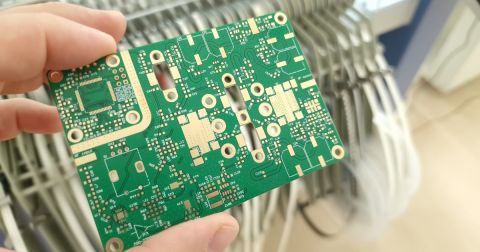
Как пример, посмотрите на этот недавно опубликованный снимок печатной платы, используемой в радарном модуле Tesla. Показанная на изображении ниже печатная плата была извлечена из радара Tesla в рамках разборки Tegan Courts на Ghost Autonomy. На этом изображении мы видим набор массивов патч-антенн последовательно-параллельного типа, с 14 элементами и 234 излучающими патчами, распределенными по модулю.

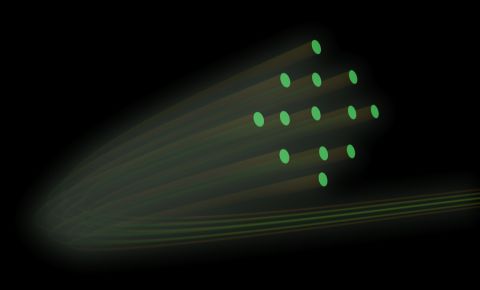
Цель проектирования новых радиолокационных систем с высоким количеством соседних антенн заключается в реализации возможностей имиджинга. Когда угловое разрешение этих систем становится достаточно высоким (менее 1 градуса в каждом ортогональном направлении сканирования), это можно оценить, глядя на график усиления в зависимости от азимута (или усиления в зависимости от высоты). В общем, с добавлением большего количества антенн в массив, пиковое усиление будет выше, а угловое разрешение вокруг пика будет более узким.

График, подобный приведенному выше, показывает, что радиолокационная система может обеспечивать чрезвычайно тонкие сканы, что означает возможность проведения множества радиолокационных измерений на одном объекте. Эти сканы под каждым углом могут быть использованы для создания 2D изображений.
В сочетании с другим датчиком, например, с камерой, система радиолокационного имиджинга теперь может идентифицировать и отслеживать движение объектов с очень высокой точностью. Это поднимает вопрос, почему бы просто не отслеживать объекты с помощью камер напрямую, или почему бы не использовать лидар?
Почему не камеры и лидар?
Технически, такой же тип сканирования можно было бы выполнить с использованием лидара, но система лидара требует более сложной оптической подсистемы, чем вы найдете в сопоставимой системе радара MIMO. Вот почему мы наблюдаем сдвиг от систем визуализации к лидару, а теперь к использованию радара.
Радарные системы могут использоваться для формирования 5D изображений (координаты x и y в 2D изображении, дальность, направление и скорость), и новое изображение может быть мгновенно сгенерировано в другой временной точке через повторное радарное сканирование. С увеличением количества антенн, установленных на печатной плате, разрешение непрерывно увеличивается, что конкурирует с лидаром.
Что насчет камер? Попытки вывести идентификацию объекта, категоризацию, дальность, направление и скорость из одного видеоклипа требуют огромного объема данных. Если количество кадров, необходимых для точной идентификации, пропорционально N, то объем тренировочных данных, необходимых для обучения по всем 5 степеням свободы, пропорционален N^5. Должно быть очевидно, что это непрактично, особенно потому, что радар предоставляет прямые измерения 3 из этих степеней свободы, и их не нужно выводить из данных изображения.
Другая причина высокого количества антенн - это отслеживание нескольких объектов. Это еще одна область, где попытка отслеживать дистанцию, направление и скорость с помощью видеопотока чрезвычайно требовательна к объему данных из-за необходимости обучающего набора данных; это просто невозможно сделать с помощью 2D-изображений, основанных на камерах. В отличие от этого, радар может напрямую измерять направление, дистанцию и скорость без использования ИИ.
Радиолокационные системы с высоким количеством антенн могут реализовывать функциональность MIMO по всему массиву, что позволяет идентифицировать и отслеживать несколько объектов через прямые измерения, что означает, что для первого шага не требуется вывод ИИ. Как только объект идентифицирован, радар может выполнить высокоразрешающее сканирование объекта для идентификации/классификации как статическое изображение с базовой нейронной сетью для стандартного компьютерного зрения.
Каковы размеры этих массивов?
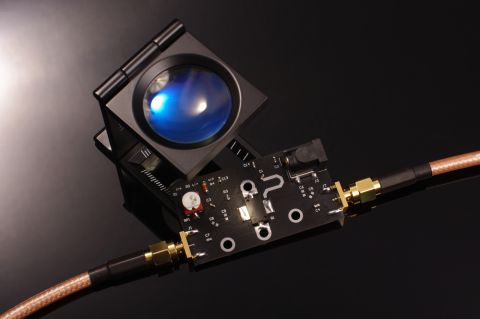
Тип графика углового разрешения может быть получен с помощью виртуального массива с ~100 или более антеннами; например, это может быть достигнуто с помощью массива 10 x 10 Tx/Rx патч-антенн на одной печатной плате. Эти массивы патч-антенн выглядят подобно изображению ниже, где большое количество излучателей размещено на одном слое.

Исходя из потребностей ИИ в выводах для передовых радиолокационных систем, описанных выше, и устранения сложных оптических систем в лидарах или интенсивных требований к обучению в видеосистемах, должно быть ясно, почему радары с высоким разрешением и большим количеством антенн выгодны. Если вы хотите построить одну из этих систем для робототехники, дронов, транспортных средств или любой другой системы, которая выигрывает от отслеживания объектов, тогда будут применяться некоторые стандартные правила проектирования печатных плат. Ознакомьтесь с следующими ресурсами, чтобы узнать больше о размещении и трассировке больших массивов:
- Что такое гибридное формирование луча?
- Как спроектировать гибридную структуру печатной платы
- Сравнение материалов для РЧ печатных плат для устройств мм-волн
- Проектирование фазированных антенных решеток для приложений 5G
Что за радаром для автомобилей?
Как я упоминал выше, существуют и другие важные области, где применимы радиолокационные системы с большим количеством антенн. Эти системы требуют интеграции с другими системами сенсоров, включая камеры и микрофоны, чтобы иметь большее восприятие окружающего мира. Следующая робототехническая система, имеющая возможности отслеживания движения и распознавания жестов, будет делать это с помощью радара, что сегодня значительно упрощено благодаря множеству вариантов интегральных схем для радиопередатчиков.
Когда вы хотите создать передовые РЧ-системы, используйте полный набор функций проектирования печатных плат и мирового класса инструменты САПР в Altium Designer®. Для реализации сотрудничества в современной междисциплинарной среде, инновационные компании используют платформу Altium 365™ для легкого обмена данными проектирования и запуска проектов в производство.
Мы только начали раскрывать возможности Altium Designer на Altium 365. Начните свою бесплатную пробную версию Altium Designer + Altium 365 сегодня.

Об авторе
Related Technical Documentation
Связанные ресурсы
Оглавление
От проектирования до выпуска — без лишних сложностей
- Привязывайте проверки к правильной версии
- Снижайте путаницу при передаче и объем доработок
- Раньше выявляйте риски, связанные с поставками и выпуском
- Работайте самостоятельно, делитесь при необходимости
Начать
Thank you, you are now subscribed to updates.

