







Warum verwenden fortschrittliche Auto-Radare so viele Antennen?

At a Glance
Fortgeschrittene Radarsysteme in Autos stützen sich auf große virtuelle Arrays für hochauflösende Bildgebung, große Reichweite und/oder die Verfolgung mehrerer Objekte.







In den letzten zwei Jahren habe ich an fast einem Dutzend Radar-Modulen gearbeitet, die hauptsächlich auf den Automobilmarkt abzielten. Eng verwandte Bereiche sind Drohnenradar, Radarsensoren für Roboter und industrielle Systeme, Radar zur Erfassung von Vitalzeichen, Bewegungs- und Gestenerkennung sowie fortschrittliche Sicherheitssysteme. Der große Fisch aus geschäftlicher Sicht befindet sich im Automobilbereich, wo immer mehr ADAS-Systeme nach besseren Wegen suchen, wichtige Daten aus der Umgebung zu erfassen.
Die betrieblichen Ziele in diesen Systemen laufen darauf hinaus, Systeme zu bauen, die autonome Fahrzeuge unterstützen können, während sie auch generell Autos sicherer machen. Um dies zu erreichen, folgen Radarsysteme, die mit sehr hohen Frequenzen arbeiten, zwei Trends:
- Neuere Radare verwenden sehr hohe Antennenzahlen, viel höher als in einem typischen Auto-Radar-Modul verwendet würden (siehe hier für ein Beispiel)
- Radar-Daten könnten neben anderen Sensordaten verwendet werden, um zusätzliche Eigenschaften der verfolgten Objekte zu erschließen
Für jeden, der in diesem Bereich innovative Systeme entwerfen möchte, ist es wichtig, diesen PCB-Designrichtlinien zu folgen, um die Vorteile höherer Antennenzahlen zu nutzen. Zuerst werden wir uns ansehen, warum innovative Radarsysteme so viele Antennen auf kleinem Raum verwenden und wie die PCB strukturiert sein muss, um diese fortgeschrittenen Fähigkeiten zu nutzen.
Höhere Antennenzahlen bieten Bildgebungsfähigkeiten
Was passiert, wenn wir ein RF-System mit mehreren gleichzeitig betriebenen, ko-lokalisierten Sende- und Empfangsantennen haben? Radarsysteme nutzen diese Architektur mit einer hohen Anzahl ko-lokalisierter Antennen, um ihre Fähigkeiten in den folgenden Bereichen zu verbessern:
- Höhere Antennenzahl = höhere Auflösung
- Höhere Antennenzahl = höherer Gewinn = größere Reichweite
- Höhere Antennenzahl = breiteres Scanfeld
- Höhere Antennenzahl = MIMO-Funktionalität zur Verfolgung mehrerer Objekte
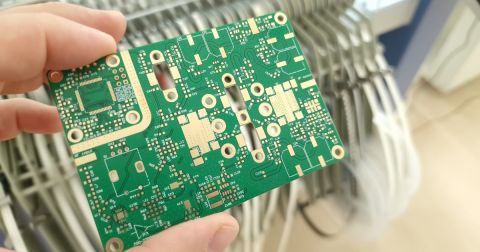
Als Beispiel betrachten Sie dieses kürzlich veröffentlichte Bild des PCBs, das in einem Tesla-Radarmodul verwendet wird. Das im Bild unten gezeigte PCB wurde aus einem Tesla-Radar als Teil eines Teardowns von Tegan Courts auf Ghost Autonomy entnommen. In diesem Bild sehen wir eine Reihe von Serien-Parallel-Patch-Antennenarrays mit insgesamt 14 Elementen und 234 strahlenden Patches, die über das Modul verteilt sind.

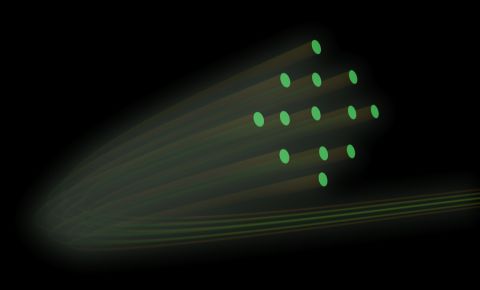
Das Ziel beim Entwurf neuerer Radarsysteme mit einer hohen Anzahl an benachbarten Antennen besteht darin, Bildgebungsfähigkeiten zu implementieren. Wenn die Winkelauflösung dieser Systeme hoch genug wird (weniger als 1 Grad in jeder orthogonalen Scanrichtung), würde dies durch Betrachtung eines Gewinn-gegen-Azimut- (oder Gewinn-gegen-Elevation-) Diagramms bewertet. Allgemein gilt, dass mit der Hinzufügung weiterer Antennen zum Array der Spitzenwert des Gewinns höher und die Winkelauflösung um den Spitzenwert herum schmaler wird.

Ein Diagramm wie das oben genannte illustriert, dass das Radarsystem extrem feine Scans durchführen kann, was bedeutet, dass mehrere Radar-Messungen über ein einzelnes Objekt hinweg gemacht werden können. Diese Scans aus jedem Winkel können verwendet werden, um 2D-Bilder zu konstruieren.
Wenn es mit einem anderen Sensor, wie einer Kamera, gekoppelt wird, kann das Radar-Bildgebungssystem nun die Bewegung von Objekten mit sehr hoher Präzision identifizieren und verfolgen. Dies wirft die Frage auf, warum nicht einfach Objekte direkt mit Kameras verfolgen oder warum nicht Lidar verwenden?
Warum nicht Kameras und Lidar?
Technisch gesehen könnte man diesen Typ von Scan auch mit Lidar durchführen, aber ein Lidar-System benötigt ein komplexeres optisches Untersystem, als man es in einem vergleichbaren MIMO-Radarsystem findet. Deshalb haben wir einen Wechsel von Visionssystemen zu Lidar und nun zur Nutzung von Radar gesehen.
Radarsysteme können verwendet werden, um 5D-Bilder zu erstellen (x- und y-Koordinaten im 2D-Bild, Entfernung, Richtung und Geschwindigkeit), und ein neues Bild kann sofort zu einem anderen Zeitpunkt durch einen wiederholten Radarscan generiert werden. Mit mehr Antennen, die auf eine PCB gepackt werden, erhält man eine kontinuierlich steigende Auflösung, die mit Lidar konkurrieren kann.
Und was ist mit Kameras? Der Versuch, Objektidentifikation, Kategorisierung, Entfernung, Richtung und Geschwindigkeit aus einem einzigen Videoclip abzuleiten, ist extrem datenintensiv. Wenn die Anzahl der Frames, die für eine genaue Identifikation benötigt werden, proportional zu N ist, dann ist die Menge an Trainingsdaten, die benötigt wird, um auf allen 5 Freiheitsgraden zu trainieren, proportional zu N^5. Es sollte offensichtlich sein, dass dies unpraktisch ist, besonders weil Radar direkte Messungen von 3 dieser Freiheitsgrade liefert und diese nicht aus Bilddaten abgeleitet werden müssen.
Ein anderer Grund für die hohe Anzahl an Antennen ist die Verfolgung mehrerer Objekte. Dies ist ein weiterer Bereich, in dem der Versuch, Reichweite, Richtung und Geschwindigkeit aus einem Videostream zu verfolgen, extrem datenintensiv ist aufgrund der Anforderungen an den Trainingsdatensatz; es kann einfach nicht mit einem 2D-Bildgebungssystem, das auf Kameras basiert, durchgeführt werden. Im Gegensatz dazu kann Radar Richtung, Reichweite und Geschwindigkeit direkt messen, ohne KI.
Radarsysteme mit einer hohen Anzahl an Antennen können MIMO-Funktionalität über das Array implementieren, was es ermöglicht, mehrere Objekte durch direkte Messung zu identifizieren und zu verfolgen, was bedeutet, dass für den ersten Schritt keine KI-Inferenz benötigt wird. Sobald ein Objekt identifiziert ist, kann das Radar einen hochauflösenden Scan des Objekts zur Identifikation/Kategorisierung als Standbild mit einem einfachen neuronalen Netzwerk für die Standard-Computer Vision durchführen.
Wie groß sind diese Arrays?
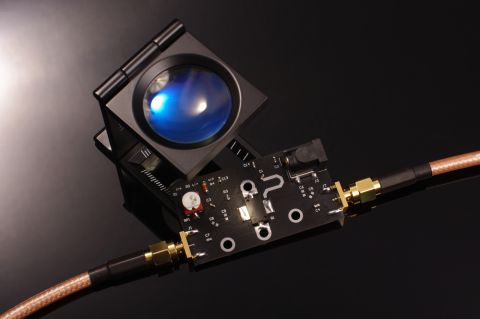
Die Art der Winkelauflösungsgrafik könnte mit einem virtuellen Array mit ~100 oder mehr Antennen erzeugt werden; zum Beispiel könnte dies mit einem 10 x 10 Tx/Rx-Array von Patch-Antennen auf einer einzigen PCB erreicht werden. Diese Patch-Antennen-Arrays sehen ähnlich aus wie das Bild unten, wo eine hohe Anzahl von Sendern auf derselben Schicht platziert sind.

Basierend auf den oben dargelegten KI-Inferenzbedürfnissen in fortschrittlichen Radarsystemen und der Eliminierung komplexer optischer Systeme in Lidar oder intensiven Trainingsanforderungen in Videosystemen, sollte klar sein, warum Hochauflösungsradare mit hoher Antennenzahl vorteilhaft sind. Wenn Sie eines dieser Systeme für Robotik, Drohnen, Fahrzeuge oder jedes andere System, das von der Objektverfolgung profitiert, bauen möchten, dann gelten einige Standard-PCB-Designregeln. Schauen Sie sich die folgenden Ressourcen an, um mehr über die Platzierung und Verdrahtung von großen Arrays zu erfahren:
- Was ist Hybrid Beamforming?
- Wie man einen Hybrid-PCB-Stackup entwirft
- RF-PCB-Materialvergleich für mmWave-Geräte
- Phased-Array-Antennendesign für 5G-Anwendungen
Jenseits von Auto-Radar?
Wie ich oben erwähnt habe, gibt es andere wichtige Bereiche, in denen Radarsysteme mit hoher Antennenzahl anwendbar sind. Diese Systeme erfordern die Integration mit anderen Sensorsystemen, einschließlich Kameras und Mikrofonen, um eine größere Wahrnehmung der umgebenden Welt zu haben. Das nächste Robotiksystem, das Bewegungsverfolgungsfähigkeiten und Gestenerkennung bietet, wird dies mit Radar tun, was heute dank vieler integrierter Schaltkreisoptionen für Radartransceiver viel einfacher ist.
Wann immer Sie hochmoderne RF-Systeme bauen möchten, nutzen Sie den kompletten Satz an PCB-Designfunktionen und erstklassige CAD-Tools in Altium Designer®. Um die Zusammenarbeit in der heutigen fachübergreifenden Umgebung zu implementieren, nutzen innovative Unternehmen die Altium 365™-Plattform, um Design-Daten einfach zu teilen und Projekte in die Fertigung zu bringen.
Wir haben nur an der Oberfläche dessen gekratzt, was mit Altium Designer auf Altium 365 möglich ist. Starten Sie heute Ihre kostenlose Testversion von Altium Designer + Altium 365.

Über den Autor / über die Autorin
Related Technical Documentation
Ähnliche Resourcen
Inhaltsverzeichnis
Vom Entwurf bis zur Freigabe – ganz ohne Reibungsverluste
- Prüfungen an die richtige Version binden
- Verwirrung bei Übergaben und Nacharbeit reduzieren
- Beschaffungs- und Freigaberisiken früher erkennen
- Allein arbeiten, bei Bedarf teilen
Erste Schritte
Thank you, you are now subscribed to updates.

