








Tại Sao Các Radar Ô Tô Cao Cấp Sử Dụng Nhiều Ăng-ten Đến Vậy?

At a Glance
Hệ thống radar xe hơi tiên tiến dựa vào các mảng ảo lớn để có khả năng chụp ảnh độ phân giải cao, tầm xa và/hoặc theo dõi nhiều vật thể.







Trong hai năm qua, tôi đã làm việc trên gần mười hai mô-đun radar, chủ yếu nhắm vào thị trường ô tô. Các lĩnh vực liên quan chặt chẽ bao gồm radar cho drone, cảm biến radar cho robot và hệ thống công nghiệp, cảm biến dấu hiệu sống bằng radar, theo dõi chuyển động và cử chỉ, và hệ thống an ninh tiên tiến. "Cá lớn" từ quan điểm kinh doanh nằm ở lĩnh vực ô tô, nơi ngày càng nhiều hệ thống ADAS tìm kiếm cách tốt hơn để thu thập dữ liệu quan trọng từ môi trường xung quanh.
Mục tiêu hoạt động trong những hệ thống này được tóm gọn là xây dựng các hệ thống có thể hỗ trợ xe tự hành đồng thời làm cho ô tô an toàn hơn nói chung. Tuy nhiên, để làm được điều này, các hệ thống radar hoạt động ở tần số rất cao đang theo đuổi hai xu hướng:
- Radar mới sử dụng số lượng ăng-ten rất cao, cao hơn nhiều so với số lượng sẽ được sử dụng trong một mô-đun radar ô tô tiêu biểu (xem ở đây để biết ví dụ)
- Dữ liệu radar có thể được sử dụng cùng với dữ liệu cảm biến khác để suy luận thêm các đặc tính của các đối tượng được theo dõi
Đối với bất kỳ ai muốn thiết kế các hệ thống sáng tạo trong lĩnh vực này, việc tuân theo các hướng dẫn thiết kế PCB này để tận dụng số lượng ăng-ten cao hơn là rất quan trọng. Đầu tiên, chúng ta sẽ xem xét tại sao các hệ thống radar sáng tạo đang sử dụng nhiều ăng-ten trong không gian nhỏ, và cách PCB cần được cấu trúc để tận dụng những khả năng tiên tiến này.
Số lượng Ăng-ten Cao Hơn Mang Lại Khả Năng Chụp Ảnh
Điều gì xảy ra khi chúng ta có một hệ thống RF với nhiều ăng-ten phát và nhận đồng vị trí hoạt động đồng thời? Các hệ thống radar đang sử dụng kiến trúc này với số lượng ăng-ten đồng vị trí cao để cải thiện khả năng của họ trong các lĩnh vực sau:
- Số lượng ăng-ten cao hơn = độ phân giải cao hơn
- Số lượng ăng-ten cao hơn = độ lợi cao hơn = tầm xa hơn
- Số lượng ăng-ten cao hơn = góc quét rộng hơn
- Số lượng ăng-ten cao hơn = chức năng MIMO để theo dõi nhiều đối tượng
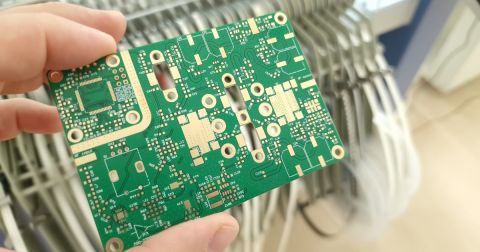
Chỉ là một ví dụ, hãy xem hình ảnh mới được phát hành này của PCB được sử dụng trong một mô-đun radar Tesla. PCB được hiển thị trong hình ảnh dưới đây được lấy từ radar Tesla như một phần của việc tháo dỡ bởi Tegan Courts trên Ghost Autonomy. Trong hình ảnh này, chúng ta thấy một bộ mảng ăng-ten vá dạng chuỗi song song, với tổng cộng 14 phần tử và 234 miếng phát sóng lan trải khắp mô-đun.

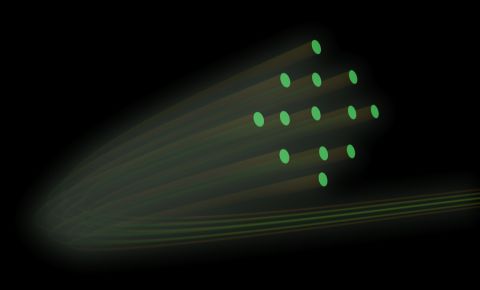
Mục tiêu trong việc thiết kế các hệ thống radar mới với số lượng ăng-ten đặt gần nhau cao là để triển khai khả năng chụp ảnh. Khi độ phân giải góc của các hệ thống này đủ cao (ít hơn 1 độ ở mỗi hướng quét vuông góc). Điều này sẽ được đánh giá bằng cách nhìn vào đồ thị tăng cường so với phương vị (hoặc tăng cường so với độ cao). Nói chung, khi càng nhiều ăng-ten được thêm vào mảng, đỉnh tăng cường sẽ cao hơn và độ phân giải góc xung quanh đỉnh sẽ hẹp hơn.

Một đồ thị như trên minh họa rằng hệ thống radar có thể cung cấp các quét cực kỳ tinh tế, nghĩa là nhiều phép đo radar có thể được thực hiện trên một đối tượng duy nhất. Những quét ở mỗi góc có thể được sử dụng để xây dựng hình ảnh 2D.
Khi kết hợp với một cảm biến khác, chẳng hạn như một máy ảnh, hệ thống chụp ảnh radar giờ đây có thể xác định và theo dõi chuyển động của các vật thể với độ chính xác rất cao. Điều này đặt ra câu hỏi, tại sao không chỉ sử dụng máy ảnh trực tiếp để theo dõi các vật thể, hoặc tại sao không sử dụng lidar?
Tại Sao Không Sử Dụng Máy Ảnh và Lidar?
Về mặt kỹ thuật, bạn cũng có thể thực hiện loại quét tương tự với lidar, nhưng một hệ thống lidar đòi hỏi một hệ thống quang phức tạp hơn so với những gì bạn có thể tìm thấy trong một hệ thống radar MIMO tương đương. Đây là lý do tại sao chúng ta đã thấy sự chuyển đổi từ hệ thống nhìn, sang lidar, và bây giờ là sử dụng radar.
Hệ thống radar có thể được sử dụng để tạo ra hình ảnh 5D (tọa độ x và y trong hình ảnh 2D, phạm vi, hướng và tốc độ), và một hình ảnh mới có thể được tạo ra ngay lập tức tại một bước thời gian khác thông qua một quét radar lặp lại. Với nhiều ăng-ten được gắn lên một PCB, bạn có độ phân giải liên tục tăng lên, cạnh tranh với lidar.
Vậy còn camera? Cố gắng suy luận việc nhận dạng đối tượng, phân loại, phạm vi, hướng và tốc độ từ một đoạn video duy nhất là cực kỳ tốn dữ liệu. Nếu số khung hình cần thiết cho việc nhận dạng chính xác tỷ lệ với N, thì lượng dữ liệu đào tạo cần thiết để đào tạo trên tất cả 5 bậc tự do tỷ lệ với N^5. Rõ ràng là điều này không khả thi, đặc biệt là vì radar cung cấp các phép đo trực tiếp của 3 trong số các bậc tự do này và chúng không cần phải được suy luận từ dữ liệu hình ảnh.
Lý do khác cho số lượng ăng-ten cao là theo dõi nhiều đối tượng. Đây là một lĩnh vực khác mà việc cố gắng theo dõi phạm vi, hướng và tốc độ từ một luồng video cực kỳ tốn dữ liệu do yêu cầu về bộ dữ liệu huấn luyện; đơn giản là không thể thực hiện được với hệ thống hình ảnh 2D dựa trên camera. Ngược lại, radar có thể đo hướng, phạm vi và tốc độ trực tiếp mà không cần AI.
Hệ thống radar với số lượng ăng-ten cao có thể triển khai chức năng MIMO trên mảng, cho phép nhiều đối tượng được xác định và theo dõi thông qua phép đo trực tiếp, nghĩa là không cần suy luận AI cho bước đầu tiên. Một khi đối tượng được xác định, radar có thể thực hiện quét độ phân giải cao của đối tượng để xác định/phân loại như một hình ảnh tĩnh với mạng nơ-ron cơ bản cho thị giác máy tính tiêu chuẩn.
Kích thước của các mảng này là bao nhiêu?
Loại đồ thị độ phân giải góc có thể được tạo ra với một mảng ảo với khoảng 100 ăng-ten hoặc nhiều hơn; ví dụ, điều này có thể đạt được với một mảng 10 x 10 Tx/Rx của ăng-ten vá trên một PCB đơn. Các mảng ăng-ten vá này trông giống như hình dưới đây, nơi một số lượng lớn bộ phát được đặt trên cùng một lớp.

Dựa trên nhu cầu suy luận AI trong các hệ thống radar tiên tiến được nêu trên, và việc loại bỏ các hệ thống quang phức tạp trong lidar hoặc yêu cầu đào tạo nặng nề trong các hệ thống video, nên rõ ràng tại sao radar độ phân giải cao với số lượng ăng-ten lớn lại có lợi thế. Nếu bạn muốn xây dựng một trong những hệ thống này cho robot, máy bay không người lái, phương tiện, hoặc bất kỳ hệ thống nào khác có lợi ích từ việc theo dõi đối tượng, thì một số quy tắc thiết kế PCB tiêu chuẩn sẽ được áp dụng. Hãy xem các nguồn tài liệu sau để tìm hiểu thêm về việc đặt và định tuyến các mảng lớn:
- Hybrid Beamforming là gì?
- Cách Thiết kế Bố cục PCB Hybrid
- So Sánh Vật liệu PCB RF cho Thiết bị mmWave
- Thiết kế Ăng-ten Mảng Pha cho Ứng dụng 5G
Vượt qua Radar Ô tô?
Như tôi đã đề cập ở trên, có những lĩnh vực quan trọng khác nơi mà các hệ thống radar với số lượng ăng-ten cao có thể áp dụng. Những hệ thống này yêu cầu tích hợp với các hệ thống cảm biến khác, bao gồm camera và microphone, để có cái nhìn tổng quan hơn về thế giới xung quanh. Hệ thống robot tiếp theo có khả năng theo dõi chuyển động và nhận dạng cử chỉ sẽ làm điều đó với radar, điều này hiện nay dễ dàng hơn nhờ nhiều lựa chọn mạch tích hợp cho bộ thu phát radar.
Khi bạn muốn xây dựng các hệ thống RF tiên tiến, hãy sử dụng bộ tính năng thiết kế PCB đầy đủ và các công cụ CAD hàng đầu thế giới trong Altium Designer®. Để thực hiện sự hợp tác trong môi trường đa ngành nghề ngày nay, các công ty đổi mới đang sử dụng nền tảng Altium 365™ để dễ dàng chia sẻ dữ liệu thiết kế và đưa dự án vào sản xuất.
Chúng ta mới chỉ khám phá bề mặt của những gì có thể thực hiện với Altium Designer trên Altium 365. Bắt đầu dùng thử miễn phí Altium Designer + Altium 365 ngay hôm nay.

About Author
Related Resources
Related Technical Documentation
Table of Contents
Thiết kế đến phát hành, không còn rào cản
- Giữ các bản đánh giá gắn với đúng phiên bản
- Giảm nhầm lẫn khi bàn giao và hạn chế phải làm lại
- Phát hiện sớm hơn các rủi ro về tìm nguồn cung ứng và phát hành
- Làm việc độc lập, chia sẻ khi cần
Bắt đầu
Thank you, you are now subscribed to updates.

