







Por Que os Radares Avançados de Carros Estão Usando Tantas Antenas?

At a Glance
Sistemas avançados de radar para carros dependem de grandes arranjos virtuais para imagens de alta resolução, longo alcance e/ou rastreamento de múltiplos objetos.







Nos últimos dois anos, trabalhei em quase uma dúzia de módulos de radar, a maioria voltada para o mercado automotivo. Campos intimamente relacionados incluem radar para drones, sensores de radar para robôs e sistemas industriais, detecção de sinais vitais por radar, rastreamento de movimento e gestos, e sistemas de segurança avançados. O grande interesse do ponto de vista empresarial está no automotivo, onde cada vez mais sistemas ADAS buscam melhores maneiras de capturar dados importantes do ambiente ao redor.
Os objetivos operacionais desses sistemas se resumem a construir sistemas que possam suportar veículos autônomos enquanto também tornam os carros mais seguros em geral. No entanto, para fazer isso, sistemas de radar operando em frequências muito altas estão seguindo duas tendências:
- Os radares mais novos estão usando um número muito maior de antenas, muito superior ao que seria usado em um módulo de radar de carro típico (veja aqui um exemplo)
- Os dados de radar poderiam ser usados ao lado de outros dados de sensores para inferir qualidades adicionais dos objetos rastreados
Para quem procura projetar sistemas inovadores nesta área, é importante seguir estas diretrizes de design de PCB para aproveitar o maior número de antenas. Primeiro, vamos olhar por que sistemas de radar inovadores estão usando tantas antenas em espaços pequenos e como o PCB precisa ser estruturado para aproveitar essas capacidades avançadas.
Contagens Mais Altas de Antenas Oferecem Capacidades de Imagem
O que acontece quando temos um sistema RF com múltiplas antenas de transmissão e recepção co-localizadas operando simultaneamente? Sistemas de radar estão utilizando essa arquitetura com um alto número de antenas co-localizadas para melhorar suas capacidades nas seguintes áreas:
- Maior contagem de antenas = maior resolução
- Maior contagem de antenas = maior ganho = maior alcance
- Maior contagem de antenas = campo de visão de varredura mais amplo
- Maior contagem de antenas = funcionalidade MIMO para rastreamento de múltiplos objetos
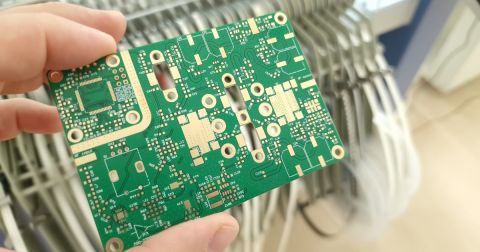
Apenas como um exemplo, dê uma olhada nesta imagem recentemente divulgada da PCB usada em um módulo de radar da Tesla. A PCB mostrada na imagem abaixo foi retirada de um radar da Tesla como parte de uma análise de desmontagem por Tegan Courts no Ghost Autonomy. Nesta imagem, vemos um conjunto de arrays de antena patch em série-paralelo, com 14 elementos totais e 234 patches radiantes espalhados pelo módulo.

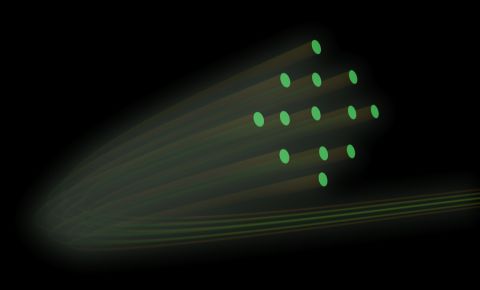
O objetivo ao projetar sistemas de radar mais novos com altas contagens de antenas co-localizadas é implementar capacidades de imagem. Quando a resolução angular desses sistemas se torna alta o suficiente (menos de 1 grau em cada direção de varredura ortogonal). Isso seria avaliado olhando para um gráfico de ganho vs. azimute (ou ganho vs. elevação). Em geral, à medida que mais antenas são adicionadas ao arranjo, o ganho de pico será maior e a resolução angular ao redor do pico será mais estreita.

Um gráfico como o acima ilustra que o sistema de radar pode fornecer varreduras extremamente finas, significando que múltiplas medições de radar podem ser feitas em um único objeto. Essas varreduras em cada ângulo podem ser usadas para construir imagens 2D.
Quando pareado com outro sensor, como uma câmera, o sistema de imagem por radar agora pode identificar e rastrear o movimento de objetos com muito alta precisão. Isso levanta a questão, por que não apenas rastrear objetos usando câmeras diretamente, ou por que não usar lidar?
Por Que Não Câmeras e Lidar?
Tecnicamente, você poderia realizar o mesmo tipo de varredura com lidar, mas um sistema lidar requer um subsistema óptico mais complexo do que você encontrará em um sistema de radar MIMO comparável. É por isso que vimos uma mudança dos sistemas de visão para lidar, e agora para o uso de radar.
Os sistemas de radar podem ser usados para formar imagens 5D (coordenadas x e y na imagem 2D, alcance, direção e velocidade), e uma nova imagem pode ser gerada instantaneamente em outro momento através de uma varredura de radar repetida. Com mais antenas embutidas em uma PCB, você tem uma resolução continuamente crescente que rivaliza com o lidar.
E quanto às câmeras? Tentar inferir a identificação, categorização, alcance, direção e velocidade de um objeto a partir de um único clipe de vídeo é extremamente intensivo em dados. Se o número de quadros necessários para uma identificação precisa é proporcional a N, então a quantidade de dados de treinamento necessária para treinar em todos os 5 graus de liberdade é proporcional a N^5. Deve ser óbvio que isso é impraticável, especialmente porque o radar fornece medições diretas de 3 desses graus de liberdade e eles não precisam ser inferidos a partir de dados de imagem.
Outro motivo para a alta contagem de antenas é o rastreamento de múltiplos objetos. Essa é outra área onde tentar rastrear a distância, direção e velocidade a partir de um fluxo de vídeo é extremamente intensivo em dados devido aos requisitos do conjunto de dados de treinamento; simplesmente não pode ser feito com um sistema de imagem 2D baseado em câmeras. Em contraste, o radar pode medir direção, distância e velocidade diretamente sem IA.
Sistemas de radar com alta contagem de antenas podem implementar funcionalidade MIMO através do arranjo, o que permite que múltiplos objetos sejam identificados e rastreados por meio de medição direta, significando que nenhuma inferência de IA é necessária para o primeiro passo. Uma vez que um objeto é identificado, o radar pode realizar uma varredura de alta resolução do objeto para identificação/categorização como uma imagem estática com uma rede neural básica para visão computacional padrão.
Quão Grandes São Esses Arranjos?
O tipo de gráfico de resolução angular poderia ser produzido com um arranjo virtual com ~100 ou mais antenas; por exemplo, isso poderia ser alcançado com um arranjo 10 x 10 Tx/Rx de antenas patch em uma única PCB. Esses arranjos de antenas patch se parecem com a imagem abaixo, onde um alto número de emissores são colocados na mesma camada.

Com base nas necessidades de inferência de IA em sistemas de radar avançados delineados acima, e na eliminação de sistemas ópticos complexos em lidar ou requisitos intensivos de treinamento em sistemas de vídeo, deve ficar claro por que radares de alta resolução com um alto número de antenas são vantajosos. Se você deseja construir um desses sistemas para robótica, drones, veículos ou qualquer outro sistema que se beneficie do rastreamento de objetos, então algumas regras padrão de design de PCB se aplicarão. Dê uma olhada nos seguintes recursos para aprender mais sobre colocação e roteamento de grandes arranjos:
- O que é Beamforming Híbrido?
- Como Projetar um Empilhamento de PCB Híbrido
- Comparação de Materiais para PCB RF para Dispositivos mmWave
- Design de Antena em Arranjo Fásico para Aplicações 5G
Além do Radar Automotivo?
Como mencionei acima, existem outras áreas importantes onde sistemas de radar com alto número de antenas são aplicáveis. Esses sistemas requerem integração com outros sistemas de detecção, incluindo câmeras e microfones, para ter uma maior percepção do mundo ao redor. O próximo sistema de robótica que possui capacidades de rastreamento de movimento e reconhecimento de gestos fará isso com radar, o que é muito mais fácil hoje graças a muitas opções de circuitos integrados para transceptores de radar.
Sempre que quiser construir sistemas RF de última geração, utilize o conjunto completo de recursos de design de PCB e ferramentas CAD de classe mundial no Altium Designer®. Para implementar a colaboração no ambiente interdisciplinar de hoje, empresas inovadoras estão usando a plataforma Altium 365™ para compartilhar facilmente dados de design e colocar projetos em fabricação.
Apenas começamos a explorar o que é possível com o Altium Designer no Altium 365. Comece sua avaliação gratuita do Altium Designer + Altium 365 hoje.

Sobre o autor
Recursos relacionados
Related Technical Documentation
Índice
Do projeto ao lançamento, sem atritos
- Mantenha as revisões associadas à versão correta
- Reduza a confusão nas transferências e o retrabalho
- Identifique mais cedo os riscos de fornecimento e de lançamento
- Trabalhe sozinho, partilhe quando necessário
Comece
Thank you, you are now subscribed to updates.

