







¿Por qué los radares avanzados para autos están utilizando tantas antenas?

At a Glance
Los sistemas avanzados de radar para automóviles dependen de grandes matrices virtuales para la obtención de imágenes de alta resolución, largo alcance y/o seguimiento de múltiples objetos.







En los últimos dos años, he trabajado en casi una docena de módulos de radar, dirigidos principalmente al mercado automotriz. Los campos estrechamente relacionados incluyen el radar para drones, sensores de radar para robots y sistemas industriales, detección de signos vitales por radar, seguimiento de movimiento y gestos, y sistemas de seguridad avanzados. El gran pez desde el punto de vista empresarial está en el automotriz, donde cada vez más sistemas ADAS buscan mejores formas de capturar datos importantes del entorno circundante.
Los objetivos operativos en estos sistemas se reducen a construir sistemas que puedan apoyar a los vehículos autónomos mientras también hacen que los autos sean más seguros en general. Sin embargo, para hacer esto, los sistemas de radar que operan a frecuencias muy altas están siguiendo dos tendencias:
- Los radares más nuevos están utilizando un número muy alto de antenas, mucho mayor que el que se usaría en un módulo de radar de coche típico (ver aquí para un ejemplo)
- Los datos del radar podrían usarse junto con otros datos de sensores para inferir cualidades adicionales de los objetos rastreados
Para cualquiera que busque diseñar sistemas innovadores en esta área, es importante seguir estas pautas de diseño de PCB para aprovechar el mayor número de antenas. Primero veremos por qué los sistemas de radar innovadores están utilizando tantas antenas en espacios pequeños, y cómo necesita estructurarse el PCB para aprovechar estas capacidades avanzadas.
Las antenas de mayor cantidad ofrecen capacidades de imagenado
¿Qué sucede cuando tenemos un sistema RF con múltiples antenas de transmisión y recepción co-ubicadas operando simultáneamente? Los sistemas de radar están utilizando esta arquitectura con un alto número de antenas co-ubicadas para mejorar sus capacidades en las siguientes áreas:
- Mayor cantidad de antenas = mayor resolución
- Mayor cantidad de antenas = mayor ganancia = mayor alcance
- Mayor cantidad de antenas = campo de visión de escaneo más amplio
- Mayor cantidad de antenas = funcionalidad MIMO para rastrear múltiples objetos
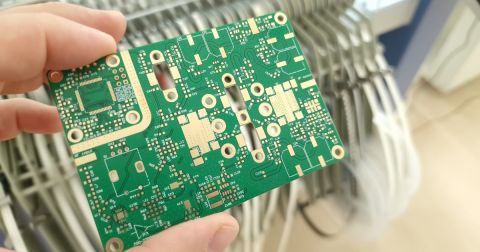
Como un ejemplo, echa un vistazo a esta imagen recientemente publicada de la PCB utilizada en un módulo de radar de Tesla. La PCB mostrada en la imagen a continuación fue tomada de un radar de Tesla como parte de un desmontaje realizado por Tegan Courts en Ghost Autonomy. En esta imagen, vemos un conjunto de arreglos de antenas en serie-paralelo, con un total de 14 elementos y 234 parches radiantes distribuidos a lo largo del módulo.

El objetivo al diseñar sistemas de radar más nuevos con un alto número de antenas co-ubicadas es implementar capacidades de imagen. Cuando la resolución angular de estos sistemas es lo suficientemente alta (menos de 1 grado en cada dirección de escaneo ortogonal). Esto se evaluaría mirando un gráfico de ganancia vs. azimut (o ganancia vs. elevación). En general, a medida que se agregan más antenas al arreglo, la ganancia pico será más alta y la resolución angular alrededor del pico será más estrecha.

Un gráfico como el anterior ilustra que el sistema de radar puede proporcionar escaneos extremadamente finos, lo que significa que se pueden tomar múltiples mediciones de radar en un solo objeto. Esos escaneos en cada ángulo se pueden usar para construir imágenes 2D.
Cuando se combina con otro sensor, como una cámara, el sistema de imagen por radar ahora puede identificar y rastrear el movimiento de objetos con mucha alta precisión. Esto plantea la pregunta, ¿por qué no simplemente rastrear objetos usando cámaras directamente, o por qué no usar lidar?
¿Por Qué No Cámaras y Lidar?
Técnicamente, podrías realizar este mismo tipo de escaneo con lidar, pero un sistema lidar requiere un subsistema óptico más complejo de lo que encontrarás en un sistema de radar MIMO comparable. Esta es la razón por la que hemos visto un cambio de los sistemas de visión, a lidar, y ahora al uso de radar.
Los sistemas de radar pueden usarse para formar imágenes 5D (coordenadas x e y en la imagen 2D, rango, dirección y velocidad), y una nueva imagen puede generarse instantáneamente en otro paso de tiempo a través de un escaneo de radar repetido. Con más antenas empaquetadas en un PCB, tienes una resolución continuamente creciente que rivaliza con lidar.
¿Qué pasa con las cámaras? Intentar inferir la identificación de objetos, categorización, rango, dirección y velocidad a partir de un único clip de video es extremadamente intensivo en datos. Si el número de fotogramas requeridos para una identificación precisa es proporcional a N, entonces la cantidad de datos de entrenamiento requeridos para entrenar en los 5 grados de libertad es proporcional a N^5. Debería ser obvio que esto es impracticable, especialmente porque el radar proporciona mediciones directas de 3 de estos grados de libertad y no tienen que inferirse a partir de datos de imagen.
La otra razón para el alto número de antenas es el seguimiento de múltiples objetos. Esta es otra área donde intentar rastrear el rango, la dirección y la velocidad a partir de un flujo de video es extremadamente intensivo en datos debido a los requisitos del conjunto de datos de entrenamiento; simplemente no se puede hacer con un sistema de imágenes 2D basado en cámaras. En contraste, el radar puede medir la dirección, el rango y la velocidad directamente sin IA.
Los sistemas de radar con un alto número de antenas pueden implementar la funcionalidad MIMO a través del arreglo, lo que permite que múltiples objetos sean identificados y rastreados mediante medición directa, lo que significa que no se necesita inferencia de IA para el primer paso. Una vez que un objeto es identificado, el radar puede realizar un escaneo de alta resolución del objeto para su identificación/categorización como una imagen fija con una red neuronal básica para la visión por computadora estándar.
¿Qué tan grandes son estos arreglos?
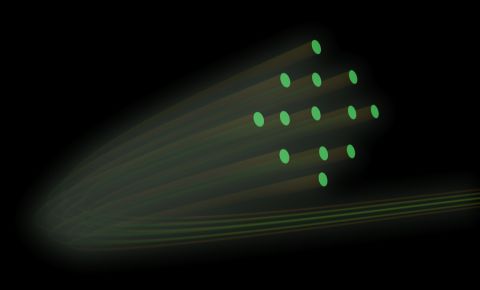
El tipo de gráfico de resolución angular podría producirse con un arreglo virtual con ~100 o más antenas; por ejemplo, esto podría alcanzarse con un arreglo de 10 x 10 Tx/Rx de antenas de parche en un solo PCB. Estos arreglos de antenas de parche se parecen a la imagen a continuación, donde se colocan un alto número de emisores en la misma capa.

Basado en las necesidades de inferencia de IA en sistemas de radar avanzados descritas anteriormente, y la eliminación de sistemas ópticos complejos en lidar o requisitos de entrenamiento intensivo en sistemas de video, debería ser claro por qué los radares de alta resolución con un alto número de antenas son ventajosos. Si quieres construir uno de estos sistemas para robótica, drones, vehículos o cualquier otro sistema que se beneficie del seguimiento de objetos, entonces se aplicarán algunas reglas de diseño de PCB estándar. Echa un vistazo a los siguientes recursos para aprender más sobre la colocación y el enrutamiento de grandes arreglos:
- ¿Qué es la Conformación de Haz Híbrida?
- Cómo Diseñar un Apilado de PCB Híbrido
- Comparación de Materiales para PCB RF para Dispositivos de Onda Milimétrica
- Diseño de Antena en Fase para Aplicaciones 5G
¿Más Allá del Radar Automotriz?
Como mencioné anteriormente, hay otras áreas importantes donde los sistemas de radar con un alto número de antenas son aplicables. Estos sistemas requieren integración con otros sistemas de detección, incluyendo cámaras y micrófonos, para tener una mayor percepción del mundo que los rodea. El próximo sistema de robótica que tenga capacidades de seguimiento de movimiento y reconocimiento de gestos lo hará con radar, lo cual es mucho más fácil hoy en día gracias a muchas opciones de circuitos integrados para transceptores de radar.
Siempre que quieras construir sistemas RF de vanguardia, utiliza el conjunto completo de características de diseño de PCB y herramientas CAD de clase mundial en Altium Designer®. Para implementar la colaboración en el entorno interdisciplinario de hoy, las empresas innovadoras están utilizando la plataforma Altium 365™ para compartir fácilmente datos de diseño y poner proyectos en fabricación.
Solo hemos arañado la superficie de lo que es posible con Altium Designer en Altium 365. Comienza tu prueba gratuita de Altium Designer + Altium 365 hoy.

Sobre el autor / Sobre la autora
Recursos Relacionados
Related Technical Documentation
Tabla de contenido
Del diseño al lanzamiento, sin fricciones
- Mantén las revisiones vinculadas a la versión correcta
- Reduce la confusión en las transferencias y el retrabajo
- Detecta antes los riesgos de abastecimiento y liberación
- Trabaja por tu cuenta y comparte cuando sea necesario
Comenzar
Thank you, you are now subscribed to updates.

