








なぜ高度な車載レーダーは多くのアンテナを使用しているのか?

At a Glance
高度な車載レーダーシステムは、高解像度のイメージング、長距離、および/または複数のオブジェクトの追跡のために、大規模な仮想アレイに依存しています。







過去2年間で、私は主に自動車市場をターゲットにしたレーダーモジュールをほぼ12個取り組んできました。密接に関連する分野には、ドローンレーダー、ロボットや産業システム用のレーダーセンサー、レーダー生体信号センシング、動作とジェスチャー追跡、そして高度なセキュリティシステムがあります。ビジネスの観点から見ると大きな市場は自動車で、ADASシステムが周囲の環境から重要なデータをより良く捉える方法を求めています。
これらのシステムの運用目標は、自動運転車をサポートできるシステムを構築するとともに、一般的に車をより安全にすることに帰着します。しかし、これを実現するためには、非常に高い周波数で動作するレーダーシステムが2つのトレンドに従っています:
- 新しいレーダーは、通常の車のレーダーモジュールで使用されるよりもはるかに高いアンテナ数を使用しています(例についてはこちらを参照)
- レーダーデータは、追跡されたオブジェクトの追加の特性を推測するために他のセンサーデータと共に使用される可能性があります
この分野で革新的なシステムを設計しようと考えている人にとっては、より高いアンテナ数を活用するためにこれらのPCB設計ガイドラインに従うことが重要です。まず、革新的なレーダーシステムがなぜ小さなスペースに多くのアンテナを使用しているのか、そしてこれらの高度な機能を活用するためにPCBがどのように構築される必要があるかを見ていきます。
高いアンテナ数がイメージング機能を提供
複数の同じ場所に配置された送信アンテナと受信アンテナを同時に動作させるRFシステムがある場合、どうなるでしょうか?レーダーシステムは、以下の領域でその能力を向上させるために、高数の同じ場所に配置されたアンテナを使用しています:
- 高いアンテナ数 = 高解像度
- 高いアンテナ数 = 高いゲイン = 長い範囲
- 高いアンテナ数 = より広いスキャン視野
- 高いアンテナ数 = MIMO機能 複数のオブジェクトの追跡のため
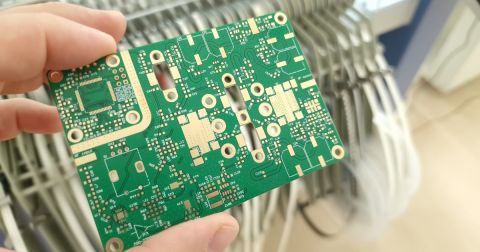
例として、最近公開されたテスラのレーダーモジュールで使用されているPCBの画像を見てみましょう。下の画像に示されているPCBは、Tegan CourtsによるGhost Autonomyでの分解の一環としてテスラのレーダーから取り出されました。この画像では、合計14個の要素とモジュール全体にわたって234の放射パッチが広がる一連の直列・並列パッチアンテナアレイを見ることができます。

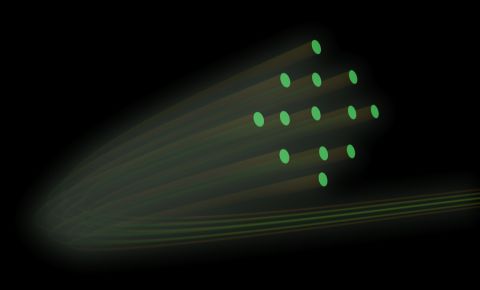
高い共置アンテナ数を持つ新しいレーダーシステムを設計する目標は、イメージング機能を実装することです。これらのシステムの角度分解能が十分に高くなると(各直交スキャン方向で1度未満)、これはゲイン対方位角(またはゲイン対仰角)グラフを見ることで評価されます。一般に、アンテナが配列に追加されると、ピークゲインは高くなり、ピーク周辺の角度分解能はより狭くなります。

上記のようなグラフは、レーダーシステムが非常に細かいスキャンを提供できることを示しており、つまり、単一のオブジェクトを横切って複数のレーダー測定が行えることを意味します。それぞれの角度でのスキャンは、2D画像を構築するために使用できます。
カメラなどの別のセンサーと組み合わせると、レーダーイメージングシステムは今、非常に高い精度でオブジェクトの識別と追跡を行うことができます。これは、なぜ直接カメラを使用してオブジェクトを追跡しないのか、またはなぜライダーを使用しないのかという疑問を投げかけます。
なぜカメラとライダーではないのか?
技術的には、この種のスキャンをライダーで行うことも可能ですが、ライダーシステムには、比較可能なMIMOレーダーシステムに見られるものよりも複雑な光学サブシステムが必要です。これが、ビジョンシステムからライダーへ、そして現在はレーダーの使用へと移行している理由です。
レーダーシステムは、5D画像(2D画像のxおよびy座標、範囲、方向、および速度)を形成するために使用でき、繰り返しのレーダースキャンを通じて別の時間ステップで即座に新しい画像を生成できます。PCB上により多くのアンテナを搭載することで、ライダーに匹敵する解像度が継続的に向上します。
カメラはどうでしょうか?単一のビデオクリップから物体の識別、分類、範囲、方向、および速度を推測しようとすることは、非常にデータ集約的です。正確な識別に必要なフレーム数がNに比例する場合、5つの自由度すべてに対してトレーニングするために必要なトレーニングデータの量はN5に比例します。レーダーがこれらの自由度の3つを直接測定し、画像データから推測する必要がないため、これが非現実的であることは明らかです。
高いアンテナ数が必要なもう一つの理由は、複数オブジェクトの追跡です。これは、範囲、方向、速度をビデオストリームから追跡しようとすると、トレーニングデータセットの要件のために非常にデータ集約的になる別の領域です。これは、カメラに基づく2Dイメージングシステムでは単純に実行できません。対照的に、レーダーはAIなしで直接、方向、範囲、速度を測定できます。
高いアンテナ数を持つレーダーシステムは、アレイ全体でMIMO機能を実装でき、これにより複数のオブジェクトを直接測定を通じて識別および追跡できるため、最初のステップにAIの推論は必要ありません。オブジェクトが識別されると、レーダーはオブジェクトの高解像度スキャンを実行して、標準的なコンピュータビジョン用の基本的なニューラルネットワークで静止画像として識別/分類できます。
これらのアレイはどれくらい大きいのでしょうか?
角度解像度グラフのタイプは、例えば、単一のPCB上に10 x 10のTx/Rxアレイのパッチアンテナで達成できる~100以上のアンテナを持つ仮想アレイで生成できます。これらのパッチアンテナアレイは、下の画像のように、同じ層に多数の発信器が配置されているように見えます。

上記で述べた高度なレーダーシステムにおけるAI推論のニーズ、およびリダーシステムの複雑な光学系の排除やビデオシステムの集中的なトレーニング要件の排除を踏まえると、高解像度レーダーが高いアンテナ数を持つことの利点は明らかでしょう。ロボティクス、ドローン、車両、またはオブジェクト追跡から恩恵を受けるその他のシステムのいずれかを構築したい場合、いくつかの標準的なPCB設計ルールが適用されます。大規模なアレイの配置とルーティングについてもっと学ぶために、以下のリソースをご覧ください:
車載レーダーを超えて?
上述したように、高いアンテナ数を持つレーダーシステムが適用される他の重要な領域があります。これらのシステムは、周囲の世界をより大きく認識するために、カメラやマイクロフォンを含む他のセンシングシステムとの統合を必要とします。次世代のロボティクスシステムは、動きの追跡機能とジェスチャー認識をレーダーで実現しますが、これは今日、レーダートランシーバー用の多くの統合回路オプションのおかげではるかに簡単です。
最先端のRFシステムを構築したい場合は、Altium Designer®の完全なPCB設計機能セットと世界クラスのCADツールを使用してください。今日のクロスディシプリナリーな環境でのコラボレーションを実装するために、革新的な企業はAltium 365™プラットフォームを使用して設計データを簡単に共有し、プロジェクトを製造に移行しています。
Altium DesignerとAltium 365で可能なことの表面をかすめただけです。今日、Altium Designer + Altium 365の無料トライアルを開始してください。

筆者について
Related Technical Documentation
関連リソース
設計からリリースまで、摩擦なく。
- レビューを適切なバージョンに紐づけ
- 引き継ぎ時の混乱や手戻りを削減
- 調達やリリースのリスクを早期に発見
- 必要に応じて共有しながら、1人でも作業可能
はじめに
Thank you, you are now subscribed to updates.

