








Pourquoi les radars avancés pour voitures utilisent-ils autant d'antennes ?

At a Glance
Les systèmes de radar avancés pour voitures s'appuient sur de grands réseaux virtuels pour obtenir une imagerie haute résolution, une longue portée et/ou le suivi de plusieurs objets.







Au cours des deux dernières années, j'ai travaillé sur près d'une douzaine de modules radar, visant principalement le marché automobile. Les domaines étroitement liés comprennent le radar pour drones, les capteurs radar pour robots et systèmes industriels, la détection des signes vitaux par radar, le suivi des mouvements et des gestes, ainsi que les systèmes de sécurité avancés. Le gros du marché, d'un point de vue commercial, se trouve dans l'automobile, où de plus en plus de systèmes ADAS cherchent de meilleures façons de capturer des données importantes de l'environnement environnant.
Les objectifs opérationnels de ces systèmes se résument à construire des systèmes pouvant soutenir les véhicules autonomes tout en rendant les voitures plus sûres en général. Cependant, pour ce faire, les systèmes radar fonctionnant à des fréquences très élevées suivent deux tendances :
- Les radars plus récents utilisent un nombre d'antennes très élevé, bien supérieur à ce qui serait utilisé dans un module radar de voiture typique (voir ici pour un exemple)
- Les données radar pourraient être utilisées aux côtés d'autres données de capteurs pour inférer des qualités supplémentaires des objets suivis
Pour quiconque cherche à concevoir des systèmes innovants dans ce domaine, il est important de suivre ces directives de conception de PCB pour tirer parti d'un nombre plus élevé d'antennes. Nous examinerons d'abord pourquoi les systèmes radar innovants utilisent tant d'antennes dans de petits espaces, et comment le PCB doit être structuré pour tirer parti de ces capacités avancées.
Des antennes en plus grand nombre offrent des capacités d'imagerie
Que se passe-t-il lorsque nous avons un système RF avec plusieurs antennes d'émission et de réception co-localisées fonctionnant simultanément ? Les systèmes radar utilisent cette architecture avec un grand nombre d'antennes co-localisées pour améliorer leurs capacités dans les domaines suivants :
- Un plus grand nombre d'antennes = une résolution plus élevée
- Un plus grand nombre d'antennes = un gain plus élevé = une portée plus longue
- Un plus grand nombre d'antennes = un champ de balayage plus large
- Un plus grand nombre d'antennes = fonctionnalité MIMO pour le suivi de multiples objets
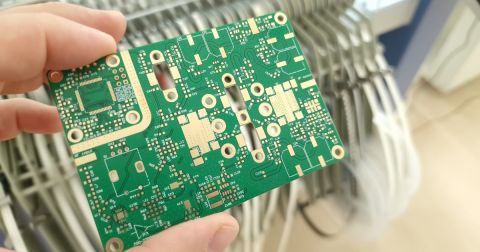
Juste pour donner un exemple, jetez un œil à cette image récemment publiée du PCB utilisé dans un module radar Tesla. Le PCB montré dans l'image ci-dessous a été pris d'un radar Tesla dans le cadre d'un démontage par Tegan Courts sur Ghost Autonomy. Dans cette image, nous voyons un ensemble de réseaux d'antennes patch en série-parallèle, avec 14 éléments au total et 234 patches rayonnants répartis sur le module.

L'objectif dans la conception de nouveaux systèmes radar avec un nombre élevé d'antennes co-localisées est de mettre en œuvre des capacités d'imagerie. Lorsque la résolution angulaire de ces systèmes devient suffisamment élevée (moins de 1 degré dans chaque direction de balayage orthogonale). Cela serait évalué en regardant un graphique de gain vs. azimut (ou gain vs. élévation). En général, à mesure que plus d'antennes sont ajoutées au réseau, le gain maximal sera plus élevé et la résolution angulaire autour du pic sera plus étroite.

Un graphique comme celui ci-dessus illustre que le système radar peut fournir des balayages extrêmement fins, signifiant que plusieurs mesures radar peuvent être prises sur un seul objet. Ces balayages à chaque angle peuvent être utilisés pour construire des images 2D.
Lorsqu'il est associé à un autre capteur, tel qu'une caméra, le système d'imagerie radar peut maintenant identifier et suivre le mouvement des objets avec une très haute précision. Cela soulève la question, pourquoi ne pas simplement suivre les objets en utilisant directement des caméras, ou pourquoi ne pas utiliser le lidar ?
Pourquoi pas les caméras et le lidar ?
Techniquement, vous pourriez réaliser ce type de balayage avec un lidar, mais un système lidar nécessite un sous-système optique plus complexe que celui que vous trouverez dans un système radar MIMO comparable. C'est pourquoi nous avons assisté à un passage des systèmes de vision au lidar, et maintenant à l'utilisation du radar.
Les systèmes radar peuvent être utilisés pour former des images 5D (coordonnées x et y dans l'image 2D, portée, cap et vitesse), et une nouvelle image peut être instantanément générée à un autre moment grâce à un balayage radar répété. Avec davantage d'antennes intégrées sur un PCB, vous obtenez une résolution sans cesse croissante qui rivalise avec le lidar.
Et les caméras alors ? Tenter d'inférer l'identification, la catégorisation, la portée, le cap et la vitesse d'un objet à partir d'un seul clip vidéo est extrêmement gourmand en données. Si le nombre de trames nécessaires pour une identification précise est proportionnel à N, alors la quantité de données d'entraînement requise pour s'entraîner sur les 5 degrés de liberté est proportionnelle à N5. Il devrait être évident que cela est impraticable, surtout parce que le radar fournit des mesures directes de 3 de ces degrés de liberté et qu'elles n'ont pas à être inférées à partir de données d'image.
L'autre raison de la grande quantité d'antennes est le suivi de plusieurs objets. C'est un autre domaine où tenter de suivre la portée, la direction et la vitesse à partir d'un flux vidéo est extrêmement gourmand en données en raison des exigences de l'ensemble de données d'entraînement ; cela ne peut tout simplement pas être réalisé avec un système d'imagerie 2D basé sur des caméras. En contraste, le radar peut mesurer directement la direction, la portée et la vitesse sans IA.
Les systèmes radar avec un grand nombre d'antennes peuvent implémenter la fonctionnalité MIMO à travers le réseau, ce qui permet d'identifier et de suivre plusieurs objets par mesure directe, signifiant qu'aucune inférence IA n'est nécessaire pour la première étape. Une fois qu'un objet est identifié, le radar peut effectuer un balayage haute résolution de l'objet pour l'identification/catégorisation comme une image fixe avec un réseau neuronal basique pour la vision par ordinateur standard.
Quelle est la taille de ces réseaux ?
Le type de graphique de résolution angulaire pourrait être produit avec un réseau virtuel d'environ 100 antennes ou plus ; par exemple, cela pourrait être atteint avec un réseau 10 x 10 Tx/Rx d'antennes patch sur un seul PCB. Ces réseaux d'antennes patch ressemblent à l'image ci-dessous, où un grand nombre d'émetteurs sont placés sur la même couche.

Basé sur les besoins d'inférence IA dans les systèmes radar avancés décrits ci-dessus, et l'élimination des systèmes optiques complexes dans le lidar ou des exigences de formation intensive dans les systèmes vidéo, il devrait être clair pourquoi les radars à haute résolution avec un grand nombre d'antennes sont avantageux. Si vous souhaitez construire l'un de ces systèmes pour la robotique, les drones, les véhicules ou tout autre système bénéficiant du suivi d'objets, alors certaines règles de conception de PCB standards s'appliqueront. Jetez un œil aux ressources suivantes pour en savoir plus sur le placement et le routage de grands réseaux :
- Qu'est-ce que le Beamforming Hybride ?
- Comment Concevoir un Empilement de PCB Hybride
- Comparaison des Matériaux pour PCB RF pour les Dispositifs en Ondes Millimétriques
- Conception d'Antenne à Réseau Phasé pour les Applications 5G
Au-delà du Radar Automobile ?
Comme je l'ai mentionné ci-dessus, il existe d'autres domaines importants où les systèmes radar avec un grand nombre d'antennes sont applicables. Ces systèmes nécessitent une intégration avec d'autres systèmes de détection, y compris les caméras et les microphones, afin d'avoir une perception plus grande du monde environnant. Le prochain système de robotique qui dispose de capacités de suivi de mouvement et de reconnaissance gestuelle le fera avec le radar, ce qui est beaucoup plus facile aujourd'hui grâce à de nombreuses options de circuits intégrés pour les émetteurs-récepteurs radar.
Chaque fois que vous souhaitez construire des systèmes RF à la pointe de la technologie, utilisez l'ensemble complet de fonctionnalités de conception de PCB et les outils CAO de classe mondiale dans Altium Designer®. Pour mettre en œuvre la collaboration dans l'environnement interdisciplinaire d'aujourd'hui, les entreprises innovantes utilisent la plateforme Altium 365™ pour partager facilement les données de conception et lancer les projets en fabrication.
Nous n'avons fait qu'effleurer la surface de ce qui est possible avec Altium Designer sur Altium 365. Commencez votre essai gratuit d'Altium Designer + Altium 365 dès aujourd'hui.

A propos de l'auteur
Related Technical Documentation
Ressources associées
Table des matières
De la conception à la mise sur le marché, sans friction
- Gardez les revues liées à la bonne version
- Réduisez la confusion lors des transferts et les retouches
- Repérez plus tôt les risques liés à l’approvisionnement et à la mise en production
- Travaillez seul, partagez lorsque nécessaire
Commencer
Thank you, you are now subscribed to updates.

