









DDR3 vs. DDR4 – was ist der Unterschied?

At a Glance
Dieser Artikel vergleicht DDR3 und DDR4 und erläutert die Herausforderungen, die mit jeder dieser Speichertypen verbunden sind.







Ähnlich wie bei allen anderen High-Speed-Designaspekten geht es auch bei der Speicherkapazität und ihrer Einbindung in aktuelle und zukünftige Designs um den Zugang zu großen Datenmengen bei möglichst hoher Geschwindigkeit.
Der Double-Data-Rate-(DDR)-Speicher hat sich im Laufe der Jahre äußerst dynamisch entwickelt. DDR debütierte 1998, gefolgt von DDR2 im Jahr 2003, DDR3 im Jahr 2007 und DDR4 im Jahr 2014; DDR5 kam 2021 auf den Markt; DDR6 wird für 2024 erwartet. Selbstverständlich ist mehr Speicher immer wünschenswert, doch er muss diese Daten auch immer schneller bereitstellen können. DDR4 RAM bietet hier erhebliche Vorteile. Jedoch sind entsprechende Designüberlegungen auf PCB-Ebene anzustellen, die sicherstellen, dass das Gesamtsystem auf Anhieb einwandfrei funktioniert – und zwar jederzeit. Dieser Artikel vergleicht DDR3 und DDR4, die damit verbundenen Herausforderungen, die verschiedenen Arten und Werkzeuge des Speicherdesigns, Anwendungshinweise und das dafür erforderliche Fachwissen, um sicherzustellen, dass der SDRAM wie gewünscht funktioniert.
Für diesen Artikel habe ich mich an John Zasio gewandt, den Co-Autor unserer beiden Bücher Right the First Time: a Practical Handbook on High-Speed PCB and System Design (in zwei Bänden). Er verfügt über mehr als 50 Jahre Erfahrung in der Elektrotechnik. Sein Expertenwissen umfasst ein breites Spektrum an Leiterplatten (PCB), integrierten und anwendungsspezifischen integrierten Schaltungen (IC, ASIC), Gate-Arrays, Standardzellen, High-Speed-Schaltungen sowie Power-Subsystem-Designthemen. John ist technischer Berater für Speeding Edge, und wir sagen immer, er ist für das IC-Design das, was Lee Ritchey, Gründer und Präsident von Speeding Edge, für das Board-Design ist. Johns Beitrag zu diesem Artikel war von unschätzbarem Wert und hochgeschätzt.
Unterschiede DDR3 - DDR4 – eine Übersicht der Unterschiede
Der Unterschied DDR3 / DDR4 wird durch verschiedene Faktoren bestimmt, darunter Geschwindigkeit, Spannungspegel und Refresh-Mechanismen. Dazu gehören die Datenrate (die Geschwindigkeit, mit der man Daten in den Arbeitsspeicher lesen oder schreiben kann), die Spannungspegel (sie sind bei DDR4 niedriger), die Häufigkeit des Speicher-Refreshs, die Zeit zwischen der Übertragung des Speicherbefehls und dessen Ausführung, der Refresh-Mechanismus, die Speicherkapazität, die Kosten, die benötigte Speicherkapazität und der Zeitpunkt, an dem Sie von DDR3 auf DDR4 umsteigen müssen (aka geplante Obsoleszenz).
John erklärt: „Als ich 1969 IBM verließ, wechselte ich zu einer Firma namens Mascor. Damals kamen dynamische Direktzugriffsspeicher (DRAMs) auf den Markt. Ich erinnere mich, dass ein Intel-Vertriebsingenieur vorbeikam und uns von diesem fantastischen Bauteil erzählte, das sie hätten und das so viel besser sei als Core-Speicher. Es hatte 1.000 Bits. An die Geschwindigkeit erinnere ich mich nicht mehr, aber der Vertriebsingenieur sagte uns, dass das Einzige, worüber wir uns bei DRAM Sorgen machen müssten, sei, dass wir dem Speicher sagen müssten, was er sich merken soll – sonst würde er es alle vier Millisekunden vergessen. Dieser Modus ist unter dem Namen Refresh bekannt. Genau das sagt das Wort ‚dynamisch‘ in DRAM aus. Es benötigt eine kleine Ladungsmenge. Man kann die Elektronen, die in einen winzig kleinen Kondensator gespeichert werden, zählen; und dieser entlädt sich nach einiger Zeit. Daher muss man den Ladungsspeichervorgang regenerieren. Man liest die winzigen Energien, die sich entladen, und bringt den Kondensator wieder auf seine ursprüngliche Ladungskapazität.“
Geschwindigkeit
John weist darauf hin, dass „DDR4 doppelt so schnell ist wie DDR3. Mit jeder DDR-Generation, die herauskommt, steigt die Geschwindigkeit um den Faktor zwei.“
DDR3 hat eine Datenübertragungsrate zwischen 800 MHz und 2133 MHz. Sie kann nicht höher als 2133 MHz gehen. Aus praktischen Erwägungen variiert die Taktrate jedoch zwischen 1600 MHz und 1800 MHz. DDR4 RAM erreicht Taktraten zwischen 1600 MHz und 3200 MHz und übertrifft damit die Leistung von DDR3 deutlich.
„Double-Data-Rate-Speicher haben zwei verschiedene Anschlussarten“, erklärt John. „Es gibt Adresspins (typischerweise Address Control genannt), und teilweise handelt es sich um Multiplexe, wie man sie bei DDR findet. Man schreibt ein Steuerwort und es wird in den Speicher gelatcht, um Register oder eine andere Funktion zu aktivieren. Danach wird eine Adresse gesetzt, und dann beginnt die Uhr zu ticken, während die Daten übertragen werden.“
„Bei DDR kommt die Adresse typischerweise vom Controller und verläuft als Bus an alle Speicherchips. Dies erzeugt Mehrfachlasten an jeder Leitung. Die Datenpins führen direkt vom Controller zu jedem Speicherchip. Typischerweise gibt es einen Treiber und eine Last pro Datenpin. Dieser Pfad ist wesentlich übersichtlicher. Und da der Pfad weniger Störungen aufweist, läuft er doppelt so schnell. Es findet eine Datenübertragung bei steigender Taktflanke und eine bei fallender Taktflanke statt. Im Gegensatz zu den Adresssteuerpins, bei denen es nur eine Information pro Taktperiode gibt. Bei einem Datentransfer von 3200 Mbit/s an der oberen DDR4-Spezifikationsgrenze hat man es also mit einem Takt von 1,6 GHz zu tun.“
John fährt fort: „Positiv ist, dass DDR4 doppelt so schnell ist wie DDR3. Die schlechte Nachricht ist jedoch, man muss sich mehr Gedanken über die Längenanpassung und Qualität der Übertragungsleitungen machen. Das ist ähnlich wie bei Glasfaserverbindungen vor 15–20 Jahren.“

Zusätzliche Elemente kommen ins Spiel: das Glasfasergewebe des Laminats, der besonders wichtige Lagenaufbau und die Induktivität von Durchkontaktierungen. John weiter: „Das sind alles Probleme, die boardseitig aufgrund der Geschwindigkeit von DDR4 relevant werden. Die gleichen Dinge, die für eine Internetverbindung mit 3, 4 oder 5 Gbit/s gelten, treffen nun auch auf diese Datensignale zu. Man kann nicht mehr einfach ein billiges Stück Basismaterial nehmen, die Platine bestücken und erwarten, dass alles funktioniert.“
Spannungspegel
Die Spannungspegel sind bei DDR3 höher als bei DDR4 (1,5 V statt 1,2 V).
„Ein größeres Problem, abgesehen vom veränderten Spannungspegel, ist der Push-Pull-Treiber in DDR3“, erklärt John. Das bedeutet, dass der Abschlusswiderstand auf dem DIMM (Dual-Inline-Speichermodul) oder an einer anderen Stelle tendenziell das Äquivalent eines 50-Ohm-Widerstands gegen 0,75 V ist, was der Hälfte der Versorgungsspannung entspricht. Der Treiber zieht ihn entweder hoch oder runter.“
Aufbau der DDR3- vs DDR4-I/Os
Die Funktionsunterschiede in DDR3 und DDR4 sind in Abbildung 2 dargestellt.

John erklärt: „Abbildung 2 zeigt auf der linken Seite einen Treiber für DDR3, der im Push-Pull-Betrieb arbeitet. Der obere P-Kanal-Transistor zieht diese Leitung nach oben in Richtung der 1,5-Volt-Versorgung. Unten befindet sich der N-Kanal-Transistor, der die Verbindung auf Masse zieht. Am anderen Leitungsende befinden sich zwei Widerstände im Speicherchip, die die Abschlusswiderstände der Leitung darstellen. Dies sind typischerweise zwei 100-Ohm-Widerstände, was einem 50-Ohm-Widerstand zur halben Spannung entspricht.“
„Sobald Sie den Treiber nach unten ziehen, fließt der Strom durch den oberen Widerstand über die Koaxialleitung des Kanals zur Masse. Bei DDR3 ist der Gesamtstrom von Vdd nach GND bei ‚1‘ bzw. ‚0‘ gleich hoch. Es ändert nur die Richtung durch den Leiter. Man braucht eine Entkopplung auf der Platine, um die hochfrequenten Änderungen im Strompfad zu kompensieren, aber der niederfrequente Strom oder Gleichstrom ist konstant und erfordert nur geringfügige niederfrequente Entkopplung.“
„Im Gegensatz dazu wird bei DDR4, in der Abbildung 2 rechts, der P-Kanal-Transistor nur zur Glättung verwendet. Es handelt sich im Grunde um einen N-Kanal-Treiber, der diese Leitung von 1,2 Volt nach unten zieht. Der Abschlusswiderstand befindet sich auf der rechten Seite und geht an 1,2 Volt.“
„Wichtig dabei ist, dass der Strom bei einem niedrigen Pegel eingeschaltet und bei einem hohen Pegel ausgeschaltet ist. Das heißt, Sie haben große Vdd-Stromänderungen und ein deutlich diffizileres Entkopplungsproblem als bei DDR3.“
„Wenn alle Leitungen gleichzeitig von einem hohen Pegel auf einen niedrigen Pegel umschalten, kann es zu sehr großen Schwankungen an der Stromversorgung und zu einer viel größeren Verlustleistung kommen, als wenn alle Leitungen auf dem niedrigen Pegel bleiben“, so John weiter. „Eine der interessanten Funktionen, um dies bei DDR4 zu kontrollieren, ist ein DBI-Signal (Datenbus-Inversion). Dabei wird im Controller auf die Anzahl der 0en und 1en in jedem Byte der ausgehenden Informationen geachtet. Normalerweise bedeutet eine 1 ein hoher Pegel und eine 0 ein niedriger Pegel. Wenn es mehr 0en als 1en gibt, invertiert dieser einfach das Datenwort und sendet ein Signal aus, das besagt: Dies ist invertiert. Dadurch zieht man nie mehr als die Hälfte der Leiter gegen Masse und spart sich die Spitzenlast. Ferner reduzieren sich dadurch die Leistungsschwankungen um den Faktor zwei. Dies ist jedoch eine Logik-Eigenschaft, keine Board-Eigenschaft.“
In Bezug auf die Board-Eigenschaften gibt es weniger Spielraum für Korrekturen, weil die Taktraten höher sind. Bei zum Beispiel 3,2 Gbit/beträgt die Periodendauer 312 ps. John stellt fest: „312 ps ist die Periode. Davon müssen Sie eine gewisse Reserve für Jitter, für Aufbau- und Haltezeiten an den Empfängern und für Signalstörungen in den Leitungen einkalkulieren. Das hat zur Folge, dass die Leitungsführung sehr genau abgestimmt werden muss. Infolgedessen können Sie es sich wahrscheinlich nicht leisten, mehr als ein paar, vielleicht bis zu fünf Prozent der 312 ps für die Variation der Leitungslänge zu reservieren. Bei DDR4 wird empfohlen, die Leitungsführung im 5ps-Bereich zu halten.“
Bei DDR3 ist die Abweichung der Leitungen innerhalb des IC-Gehäuses bereits wesentlich größer. John erklärt: „Wenn Sie die Leiterbahnen konstruieren, müssen Sie zum Chip-Hersteller gehen, um die Leitungslänge jeder Leitung im IC-Gehäuse sowie die Dielektrizitätskonstante und die Geschwindigkeit dieser Leitungen herauszufinden. Anschließend muss die endgültige Zahl von der Variante, die auf dem Board vorhanden ist, subtrahiert werden.“
Testfunktionen bei DDR4
Ungeachtet der oben genannten Herausforderungen zeigt DDR4 RAM eine Reihe von Merkmalen, die bei DDR3 fehlen. Einige dieser Funktionen sind äußerst praktisch für Produktentwickler, die High-Speed-Produkte wie Server oder Router entwerfen. „Eines dieser hilfreichen DDR4-Features sind die Testfunktionen“, fährt John fort. „Ich arbeite oft mit Prozessoren mit vielen DIMMs. Kürzlich hatte ich ein Design mit vier Speicher-DIMMs und vier Controllern, was bedeutet, dass viele Hunderte Leiterbahnen aus einem ziemlich großen BGA herauskommen. Es gibt keinen JTAG-Test, um jede Verbindung zu prüfen, ob sie korrekt verlötet sind. Also bauten wir kleine Testplatinen, die wir in den DIMM-Sockel steckten. Wir gaben eine Information aus, z. B. eine Adressleitung auf diesem Jumperboard, legten sie auf die Datenleitung und führten sie zurück. Wenn wir an Adressleitbahn wackelten, erwarteten wir, dass sich eine Datenleitung bewegt. Ganz ähnlich wie bei JTAG. Das war zwar mühsam und arbeitsintensiv, aber es war es uns wert, um alle kalten Lötstellen oder unterbrochenen Verbindungen zu finden, bevor wir das Gesamtsystem zusammenbauen und dann erst das Problem auftritt. Bei DDR4 ist diese Funktionalität direkt im Chip integriert.“
„Außerdem gibt es einen Testmodus, der sagt: 'Ich bin im Testmodus und mich interessiert die Geschwindigkeit nicht. Ich erzeuge Bitmuster aus 1en und 0en auf den Adressleitungen.' Dieses Pattern wird auf die Adressleitungen gelegt und es kommt bei sehr geringen Geschwindigkeiten auf den Datenleitungen wieder raus. Damit kann man sehr gut testen.“
Herstellung von DDR-Modulen
In großen Speichern gibt es redundante Zeilen und Spalten, um eventuelle Fertigungsfehler aufzufangen. In der Halbleiterfertigung kann eine winzige Verschmutzung einen Transistor faktisch auslöschen und dazu führen, dass eine Zeile nicht mehr funktioniert. Früher befanden sich kleine Sicherungen auf der Oberfläche jedes Speicherchips. Teil der Produktionstests ist es, jede Zeile, jede Spalte und jede Bit-Anordnung zu testen und die Sicherungen dazu zu verwenden, um festzustellen, welche Spalten und Zeilen gut sind und welche ignoriert werden sollen.
John erklärt: „Mit den heutigen Speicherchips stehen dem Kunden mindestens eine oder zwei zusätzliche Zeilen zur Verfügung, sodass das elektrisch im Einsatz erfolgen kann, da die Bits mit der Zeit ‚verschleißen‘. Statt den Speicher zu entsorgen und einen Servicetechniker anzurufen, kann man nun sagen: ‚Ich habe diese fehlerhafte Zeile auf diesem Chip, also tausche ich sie aus.‘ Wenn Sie an die heutzutage hergestellten 13-Zoll-Wafer denken, ist das Detektieren von Mängeln sehr schwierig – und jeder wird zu 100 % getestet. Sie finden Defekte auf jeder Maskenschicht, und es davon gibt es insgesamt 40. Das sind riesige Datenmengen. All das wird mit Laserscannern erfasst und über Glasfaserkabel an Server weitergeleitet.“
Verschiedene Bauweisen
Es gibt Unterschiede DDR3- und DDR4-Speicher und unterschiedliche Bauweisen, die beim Design von Speicherchips verwendet werden.
John Zasio, Technologieberater von Speeding Edge und Experte für Komponentendesign, erklärt: „Es gibt Leute, die setzen DIMMs ein, und es gibt Leute, die entwerfen nach dem Motto ‚lasst uns den Chip auf die Leiterplatte direkt neben den Controller setzen‘. Platziert man aber den Chip direkt auf der Leiterplatte, kann man einige unangenehme Probleme bekommen: Bei Speicherchips liegen die Pins ziemlich dicht beieinander. Auf einer großen Serverplatine ist die Leiterplatte leicht 1/10 Zoll dick und hat 20 Lagen. In dieser Konfiguration ist es äußerst schwierig, die Speicherchips auf die Platine zu platzieren und die Leitung abzustimmen. Meine Kunden, die mit großen Speichern in richtig schnellen Netzwerkprodukten zu tun haben, verwenden Speicher-DIMMs. Sie versuchen gar nicht erst, die Chips auf der Platine zu platzieren. Man kann Chips auf die Platine setzen, wenn man einen winzig kleinen Controller bauen will oder ein Endprodukt wie ein Smartphone herstellt, bei dem eine sehr dünne Platine mit einem Build-up-Prozess statt mit gebohrten Löchern gefertigt wird.“
DIMM-Typen
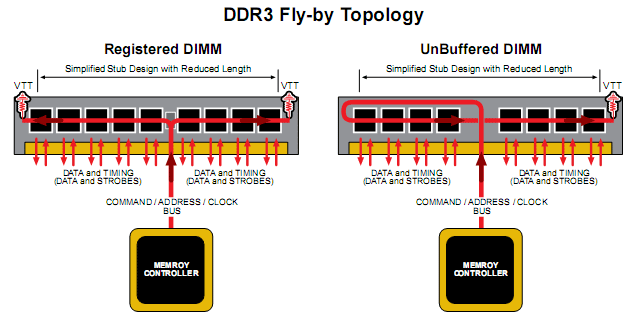
Es gibt zwei DIMM-Typen: Ein Typ ist gepuffert, auch als Registertyp bezeichnet; der andere ist ungepuffert. Ungepuffert bedeutet, dass die ADD/CTR-Leitungen, die aus dem Controller kommen, in das DIMM gehen und dann seriell die Länge des DIMMs entlanglaufen und jeden einzelnen Chip darauf kontaktieren, um die Adresse und die Steuersignale für diese Chips zu erhalten. Da so viele Chips mit den Leitungen verbunden sind, stellt die Signalintegrität eine enorme Herausforderung dar. Die Leitungsimpedanzen ändern sich ebenso wie die Fertigungstoleranzen, sodass eine Menge Simulationen durchgeführt werden müssen, um sicherzustellen, dass das Produkt mit der erforderlichen Taktfrequenz funktioniert.
Abbildung 3: DDR3-Routing-Topologie für gepufferte (registered) und ungepufferte DIMMs
„Wenn Sie ein gepuffertes DIMM verwenden, dann kommen die Adresse und die Steuerung auf das DIMM und da ist nur eine Last – genau wie bei den Datenpins“, so John weiter. „Es gibt eine Last am Treiber und eine Last am DIMM. Die resultierende Leitung ist recht störungsfrei. Die Chancen, den Speicher optimal auszulegen, sind also um eine Größenordnung besser, wenn Sie ein gepuffertes statt ein ungepuffertes DIMM benutzen. Es gibt eine weitere Option: DIMMs mit 64 Bit oder 72 Bit. Der 72-Bit-Typ wird als Fehlerkorrektur und -kontrolle (Error Correction and Control, ECC) bezeichnet. Mit diesen zusätzlichen Bits sind genügend Informationen enthalten, damit der Controller ein empfangendes fehlerhaftes Bit erkennen kann. Wenn Sie etwas lesen und ein Bit ist falsch, kann die Steuerung erkennen, welches falsch ist und es durch Umkehren des Bits korrigieren. Dies ist wegen der Ein-Bit-Fehler bei DRAMs eine sehr wichtige Angelegenheit: Diese werden durch kosmische Teilchen oder Alpha-Teilchen verursacht, die vom ‚Himmel regnen‘ und selbst durch 12 Meter Blei gehen können. Wenn ein solches Teilchen eine Speicherzelle trifft, löscht es ein Speicherbit. In großen Servern passiert das garantiert regelmäßig. Mit den zusätzlichen Bits lässt sich das Problem aber leicht beheben.“
„Die Kosten für diese zusätzlichen ECC-Bits sind im Vergleich zu einem Prozessor, der sich aufhängt oder nicht so arbeitet, wie er sollte, marginal“, fährt er fort. „Mit einem gepufferten DIMM wird das PCB-Design viel einfacher, weil man nur einen Treiber und eine Last hat. Sie müssen sich nicht um all die Fertigungstoleranzen kümmern, da die Leitungen über das DIMM gehen. All das kostet ein paar Dollar pro DIMM mehr. Aber wenn Sie es mit einer großen Anlage im Wert von 100.000 oder 1.000.000 Dollar zu tun haben, ist ein zusätzlicher Dollar keine große Sache, wenn Sie so sicherzustellen können, dass Ihr Design von Anfang an und jederzeit richtig funktioniert. Ohne die Register haben Sie es mit den Fertigungstoleranzen der Leitungslängen auf dem DIMM-Speicher und der Kondensatoren in den einzelnen Bausteinen zu tun, und es kann sein, dass Sie nicht alle Ausnahmefälle treffen und regelmäßig ein paar Fehler haben. Deshalb gebe ich meinen Kunden immer die Empfehlung, gepufferte DIMMs einzusetzen.“
Applikationshinweise, Tools und Designkompetenz
Wie wir in mehreren Abschnitten unseres erwähnten Buchs festgestellt haben, ist es oft nicht der sinnvollste Weg, sich auf die Anwendungshinweise des Chip-Herstellers zu verlassen. „Ich hatte vor ein paar Jahren einen Kunden“, erklärt John, „der ein FPGA und ein RLDRAM mit 2,4 Gbit/s einsetzte. Die Impedanzen in den Appication Notes für die Adress-/Steuerleitungen waren falsch. Der Chip-Hersteller wollte jedoch keine Garantie geben, dass das Bauteil funktioniert, sollte der Kunde andere Impedanzen verwenden als die, die sich auf der Testplatine bewährt hatten.“
„Am Ende simulierten wir das Bauteil und seinen Betrieb mit einem Tool von HyperLynx, um festzustellen, ob es mit den mangelhaften Leitungsimpedanzen des Herstellers funktionieren würde. Der Kunde hatte nicht die technische Erfahrung und das Fachwissen, um die Applikationshinweise zu hinterfragen, also entwickelten wir das Board für ihn. Das war sicher nicht der beste Weg, das Board zu konstruieren. Die Herausforderung besteht darin, dass selbst die Chip-Hersteller nicht immer die Speicherschnittstellen verstehen: die Anforderungen an die Übertragungsleitungen; die Notwendigkeit, mehrere Chips in eine Reihe zu bekommen; und die Impedanzänderungen“, fügt John hinzu. „Wenn sie also diese Faktoren nicht verstehen, ist es nicht überraschend, dass ihre Anwendungshinweise fehlerhaft ausfallen können.“
Woher wissen Sie, wann Sie zur nächsten Produkt-Iteration übergehen sollten?
Angesichts der gestiegenen Geschwindigkeiten der Netzwerkprozessoren besteht ein entsprechend hoher Bedarf an schnelleren Speichern. Doch wie John zitiert: „Es dauert eine bestimmte Anzahl von Nanosekunden, bis ein Prozessor in einem Server sagt: 'Ich brauche ein paar Informationen' vom Speicher und dann den Cache abruft, der normalerweise ein On-Chip-Speicherblock mit kürzlich verwendeten Informationen ist. Ist die Information dort nicht vorhanden, lautet die Anweisung, ‚im Hauptspeicher nachzusehen‘ und sie dort zu suchen. All das benötigt Zeit, um über die Leitungen auf den DRAM zuzugreifen und dann die Informationen zurück in den Controller-Chip zu laden.“
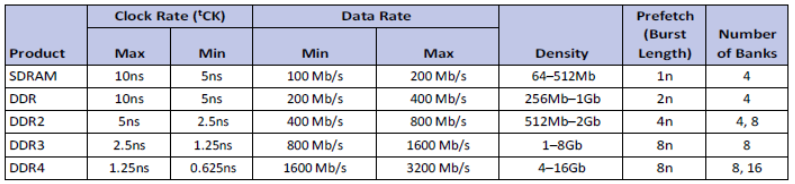
„Interessanterweise hat sich die effektive Speicherzugriffszeit in Nanosekunden in den letzten zehn Jahren nicht wesentlich erhöht. Was sich jedoch geändert hat, ist, die Taktrate. Die Datenmenge, die Sie abrufen können, nachdem Sie die Anfrage initiiert haben, verdoppelt sich alle paar Jahre. Zum anderen sind die Halbleitertransistoren kleiner geworden, sodass man mehr Speicherzellen in den Speicherchip packen kann. Wie in Tabelle 1 dargestellt, ist die Speichermenge enorm gestiegen. Es geht hoch bis zu 16 Gbit pro Speicherchip. Jede neue Generation liefert eine Verdopplung der Datenmenge auf dem Chip bei doppelter Geschwindigkeit. Dies ist wichtig für Anwender, die Netzwerkprozessoren, Router oder Server entwickelt. Sie müssen mit dem Stand der Technik mithalten und benötigen dafür schnellere Prozessoren und schnellere Speicher.“
Tabelle 1. Zunahme der Speichermenge (Quelle: Micron Technology)
Was die Entwicklungswerkzeuge betrifft, so können Simulatoren bei der Entwicklung von Speichern zwar helfen, aber sie sind komplex und erfordern ein hohes Maß an technischem Fachwissen, um sie zu verwenden. „Es gibt Simulatoren, die den Konstruktionsprozess unterstützen können, aber es ist sehr, sehr schwierig, alle notwendigen Informationen in die Programme zu bekommen“, erklärt John. „Es ist wie mit sehr komplizierten Tabellenkalkulationen. Man kann Berechnungen durchführen und erhält eine Antwort, aber die Antwort ist nur so gut wie die Zahlen, die man in das Spreadsheet eingibt. Man benötigt sehr gute Modelle für die Übertragungsleitungen, die Auswirkungen des Glasfasergewebes und der Via-Stubs, der Pins auf dem Gehäuse und der Leiterbahnlängen innerhalb des Gehäuses vom Controller-Chip zur Platine. Diese Tools sind zwar sehr gut, aber die Erstellung der Modelle ist oft sehr aufwändig. Was diese Art von Entwicklungsarbeit erfordert, ist jemand, der eine Menge Erfahrung im Umgang mit kleinsten Details hat. Das ist keine Fähigkeit, die man über Nacht erwirbt.“
Zusammenfassung
Die gute Nachricht ist, dass moderne Technologien wie DDR5 Fortschritte machen. Der Unterschied DDR4 / DDR5 liegt vor allem in den erhöhten Datenraten und optimierten Energiemanagementfunktionen. Basierend auf der bisherigen Technologieentwicklung werden die Speicherkapazitäten immer weiter steigen. Die Herausforderung besteht darin, zu verstehen, wie DDR3 vs. DDR4 funktioniert und was auf Board-Ebene erforderlich ist, um sicherzustellen, dass diese Designs korrekt funktionieren.
Kontaktieren Sie uns oder laden Sie eine kostenlose Testversion von Altium Designer® und Altium Concord Pro herunter. Sie haben Zugang zu den besten MCAD/ECAD-Co-Design und Datenverwaltungsfunktionen der Branche in einem einzigen Programm. Sprechen Sie noch heute mit einem Altium-Experten, um mehr zu erfahren.

Über den Autor / über die Autorin
Related Technical Documentation
Ähnliche Resourcen
Inhaltsverzeichnis
Vom Entwurf bis zur Freigabe – ganz ohne Reibungsverluste
- Prüfungen an die richtige Version binden
- Verwirrung bei Übergaben und Nacharbeit reduzieren
- Beschaffungs- und Freigaberisiken früher erkennen
- Allein arbeiten, bei Bedarf teilen
Erste Schritte
Thank you, you are now subscribed to updates.

