Skip to main content
Mobile menu
ソリューション
Octopart Discover
世界最大級の電子部品検索エンジン 部品情報、市場供給状況、代替候補を一元的に確認し、設計初期段階から迅速な意思決定を支援
Altium Develop
高度なPCB設計とクラウド共同作業 回路設計からレイアウト、レビュー、データ共有までを単一環境で実現
Altium Agile Teams
チーム開発を標準化・高速化 設計・調達・製造をつなぎ、部門をまたいだ共同作業を効率化
Altium Agile Enterprise
開発データとプロセスを統制 要求からリリースまでを一元管理し、トレーサビリティとガバナンスを強化
リソース&サポート
Free Altium 365 Tools
Gerber Compare
Online PCB Viewer
リソース&サポート
ラーニングハブ
サポートセンター
マニュアル
Webセミナー
Altium Community
フォーラム
バグの報告
アイディア
大学・高専
学生ラボ
Free access to professional PCB design software, training, and learning resources for students
教育者センター
A comprehensive education platform providing curriculum, software, training, and classroom resources for educators
Altium Education カリキュラム
Free college- and university-level PCB design curriculum designed to prepare students for real-world engineering careers
Altium Professional Training
Flexible on-demand and instructor-led training courses that help engineers build and advance their PCB design skills
Search Open
Search
Search Close
サインイン
シグナルインテグリティ
Main menu
ホーム
PCB設計
PCB設計コラボレーション
コンポーネント管理
設計データ管理
製造出力
ECAD/MCAD
HDI設計
高速設計
マルチボード設計
PCBレイアウト
PCB配線
PCBサプライチェーン
パワーインテグリティ
RF設計(高周波回路)
リジッドフレキシブル基板設計
回路設計
シグナルインテグリティ
シミュレーション/解析
ソフトウェア
Develop
Discover
Agile
Altium 365
Altium Designer
リソース
プログラム
Altium Academy
エンジニアリングニュース
ガイドブック
ニュースレター
ポッドキャスト
プロジェクト
トレーニングコース
Webセミナー
ホワイトペーパー
ホーム
シグナルインテグリティ
シグナルインテグリティ
リソースライブラリを参照して、PCB設計とシグナルインテグリティの詳細をご覧ください。
What is Signal Integrity?
PCB Design Fundamentals
xSignals in Altium
Signal Integrity Stimulus Design Rules
Basics of Signal Integrity Analysis
Overview
ガイドブック
ビデオ
Tech Docs
All Content
Filter
見つかりました
Sort by
最新
人気順
タイトル(昇順)
タイトル(降順)
役割
電気技術者
PCB設計者
ソフトウェア
Develop
Agile
Altium Designer
Altium 365
Octopart
コンテンツタイプ
ガイドブック
ビデオ
ポッドキャスト
ホワイトペーパー
方法: インピーダンスマッチングと容量性負荷の終端 처리
1 min
Blog
この記事では、インピーダンスマッチングと容量性負荷終端について検討します。
記事を読む
マイクロコントローラーのクロックソースの重要性
1 min
Blog
マイクロコントローラーに使用する必要があるクロック信号は、主に、内蔵デバイスの性質とその動作環境に依存します。
記事を読む
SAP(セミアディティブPCBプロセス):基本事項
1 min
Blog
専門家のTara Dunnが、半加算PCB製造プロセスとその利点について回答します。今すぐ読んで、SAPについてもっと学びましょう。
記事を読む
差動ペア、差動信号とは?
1 min
Thought Leadership
PCB設計者
電気技術者
シミュレーションエンジニア
差動ペアと差動信号は、高速デジタル通信とデータ転送の中心的な要素です。
記事を読む
シグナルインテグリティとは?
1 min
Blog
PCB設計者
システムエンジニア/アーキテクト
シグナルインテグリティの基本と、基板レイアウトがシグナルインテグリティのベスト・プラクティスに準拠していることを確認する方法について説明します。
記事を読む
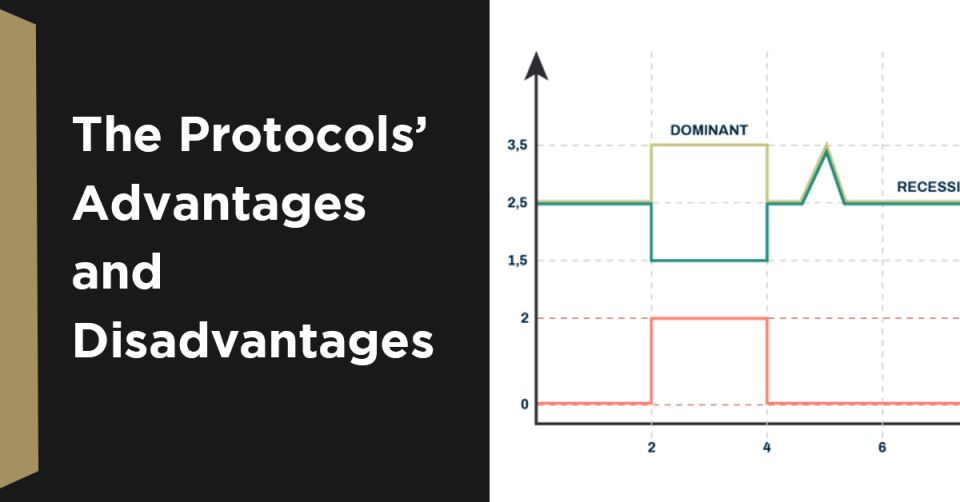
シリアル通信プロトコルの比較
1 min
Thought Leadership
このシリーズの最後に、マイクロコントローラー、データ生成周辺機器、データ処理プロセッサー、その他のインテリジェントデバイス間で情報を転送するために利用可能な各種シリアル通信プロトコルの利点と欠点をまとめます。
記事を読む
PCBパワープレーンに信号を配線する必要性は?
1 min
Blog
PCBパワープレーンを信号で切断する前に、インピーダンスコントロール パワープレーンの電流容量などに注意して、信頼性を高めてください。
記事を読む
Pagination
First page
« First
Previous page
‹‹
Page
7
現在のページ
8
Page
9
Page
10
Page
11
Page
12
Next page
››
Last page
Last »