Skip to main content
Mobile menu
ソリューション
Octopart Discover
世界最大級の電子部品検索エンジン 部品情報、市場供給状況、代替候補を一元的に確認し、設計初期段階から迅速な意思決定を支援
Altium Develop
高度なPCB設計とクラウド共同作業 回路設計からレイアウト、レビュー、データ共有までを単一環境で実現
Altium Agile Teams
チーム開発を標準化・高速化 設計・調達・製造をつなぎ、部門をまたいだ共同作業を効率化
Altium Agile Enterprise
開発データとプロセスを統制 要求からリリースまでを一元管理し、トレーサビリティとガバナンスを強化
リソース&サポート
Free Altium 365 Tools
Gerber Compare
Online PCB Viewer
リソース&サポート
ラーニングハブ
サポートセンター
マニュアル
Webセミナー
Altium Community
フォーラム
バグの報告
アイディア
大学・高専
学生ラボ
Free access to professional PCB design software, training, and learning resources for students
教育者センター
A comprehensive education platform providing curriculum, software, training, and classroom resources for educators
Altium Education カリキュラム
Free college- and university-level PCB design curriculum designed to prepare students for real-world engineering careers
Altium Professional Training
Flexible on-demand and instructor-led training courses that help engineers build and advance their PCB design skills
Search Open
Search
Search Close
サインイン
シグナルインテグリティ
Main menu
ホーム
PCB設計
PCB設計コラボレーション
コンポーネント管理
設計データ管理
製造出力
ECAD/MCAD
HDI設計
高速設計
マルチボード設計
PCBレイアウト
PCB配線
PCBサプライチェーン
パワーインテグリティ
RF設計(高周波回路)
リジッドフレキシブル基板設計
回路設計
シグナルインテグリティ
シミュレーション/解析
ソフトウェア
Develop
Discover
Agile
Altium 365
Altium Designer
リソース
プログラム
Altium Academy
エンジニアリングニュース
ガイドブック
ニュースレター
ポッドキャスト
プロジェクト
トレーニングコース
Webセミナー
ホワイトペーパー
ホーム
シグナルインテグリティ
シグナルインテグリティ
リソースライブラリを参照して、PCB設計とシグナルインテグリティの詳細をご覧ください。
What is Signal Integrity?
PCB Design Fundamentals
xSignals in Altium
Signal Integrity Stimulus Design Rules
Basics of Signal Integrity Analysis
Overview
ガイドブック
ビデオ
Tech Docs
All Content
Filter
見つかりました
Sort by
最新
人気順
タイトル(昇順)
タイトル(降順)
役割
電気技術者
PCB設計者
ソフトウェア
Develop
Agile
Altium Designer
Altium 365
Octopart
コンテンツタイプ
ガイドブック
ビデオ
ポッドキャスト
ホワイトペーパー
伝送線路における位相歪みの分析方法
1 min
Blog
伝送線路で位相歪みを見つけたい場合は、伝達関数に注意してください。
記事を読む
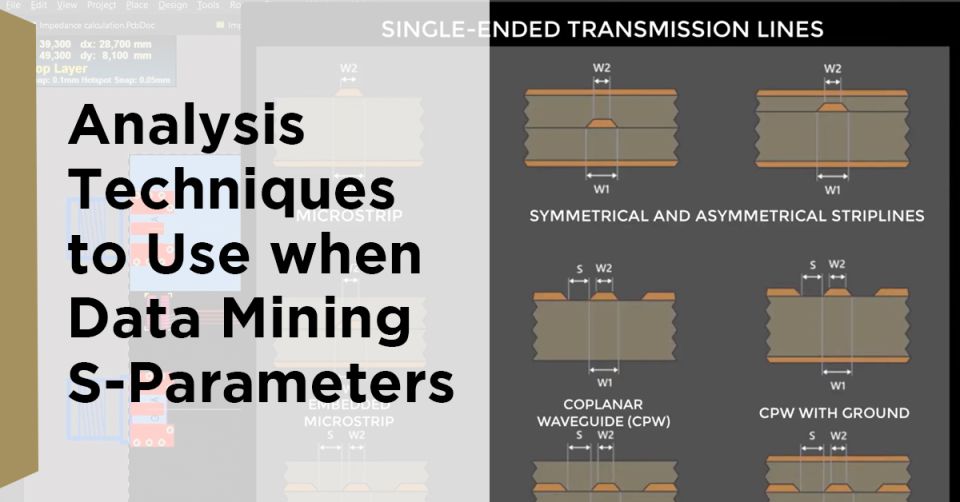
測定されたSパラメータの専門家による分析
1 min
Blog
Sパラメータ解析についての紹介を読む。この記事では、ポートマップの識別方法、挿入損失と反射損失の見た目、時間領域でのさまざまなSパラメータの見え方、およびSパラメータをデータマイニングする際に使用する追加の分析技術について説明します。
記事を読む
次のプロジェクトでサーミスタを使用する方法
1 min
Altium Designer Projects
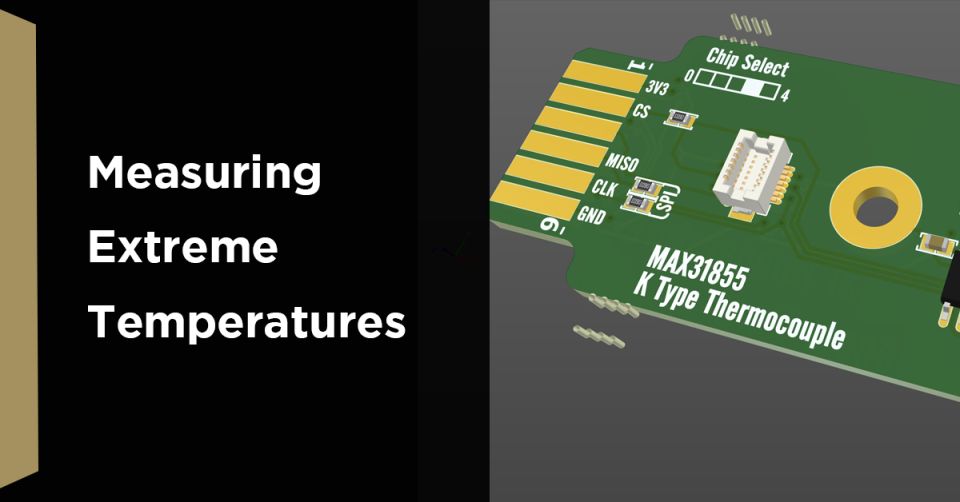
サーミスタは、電子プロジェクトで使用する可能性のあるすべての主要な温度センサーのタイプを見ていくシリーズの最終 センサータイプです。このシリーズでは、プロジェクトでさまざまな温度センサーを実装する方法について見てきました。シリーズの最後には、実際の条件を使用してセンサーと実装を頭ごなしの競争に出します。この実世界でのテストを通じて、さまざまなセンサーがどのように振る舞い、変化する条件にどのように反応するか、また、感知した温度の出力がどれだけ線形で正確かについて、より良い理解を得ることができます。 このプロジェクトの設計ファイルは、他のすべてのプロジェクトと同様に、オープンソースのMITライセンスの下で GitHubに公開されています。商用プロジェクトであっても、回路やプロジェクトを自由に使用することができます。 温度センサーは多くの産業にとって不可欠であり、サーミスタはそれらの中でも特にそうです。サーミスタは非常に正確であり、感知温度の範囲が広いため、多くの産業用サーモスタット、プロセス制御、監視アプリケーションに理想的です。このシリーズでは、さまざまなセンサータイプとそれらを最適に使用する方法を見ていきます。次のような内容を見ていきます: 負温度係数(NTC)サーミスタ 正温度係数(PTC)サーミスタ 抵抗温度検出器(RTD) アナログ温度センサIC デジタル温度センサIC 熱電対 以前、この温度センサに関するシリーズの導入で、2つのプロジェクトテンプレートを構築しました。これらのプロジェクトテンプレートはそれぞれ同じインターフェースとコネクタの配置を持っており、私たちが見ているさまざまな温度センサーすべてに対して標準的なテストセットアップを持つことができます。これらのプロジェクトの1つはデジタル温度センサー用に、もう1つはアナログ温度センサー用に設計されています。この記事では、両方を使用し、デジタルプロジェクトテンプレートを 高解像度ADC用に、アナログテンプレートを他のすべての実装用に使用します。 このシリーズの結論として、これらのセンサーカード用に2つのホストボードを構築します。1つは検証目的で単一のカードをテストするために設計され、もう1つはカードのスタックにインターフェースするために設計されます。この2番目のホストボードは、複数のセンサーを搭載した後、すべてのセンサー実装のパフォーマンスを評価する際に使用されます。 熱電対 もし、これまで見てきたセンサーでは測定できない極端な温度を測定したい場合、サーモカップルを探しているかもしれません。サーモカップルは、これまで見てきた他のセンサーとは全く異なる方法で動作し、抵抗の変化を測定するのではなく、異なる合金の金属を溶接して生成される電位差( 電圧)から測定します。これにより、適切なサーモカップルを使用すれば、絶対零度から鉄や鋼の融点を超える温度まで測定することができます。サーモカップルは構造も非常に頑丈で、このプロジェクトで見てきた他のセンサーほど簡単には壊れません。サーモカップルは抵抗温度検出器ほど正確ではありませんが、特に広範囲な温度範囲を考慮すると、ほとんどのアプリケーションに対して十分な精度を提供します。 サーモカップルが温度から電気を生成するという事実は、 電源として宇宙探査においても価値があります。放射性熱源の周りに数千のサーモカップルを直列に配置することで、放射性同位体熱電気発電機が作られ、これはボイジャー探査機、カッシーニ、ニューホライズンズ、そして火星のキュリオシティローバーなどの深宇宙ミッションに使用されました。 私たちの目的において、正極にニッケルクロムを、負極にニッケルアルミニウムを使用したK型熱電対は、最も一般的で最も安価な熱電対のタイプであり、私たちが使用するものです。K型熱電対を使用すると、-270℃から約1372℃までの温度を測定でき、それぞれ-6.458mVから54.886mVを生成します。ご覧の通り、この広い温度範囲を通じて生成される電圧の量はかなり少ないため、この微小な電圧から温度を測定するためにはいくつかの回路が必要になります。最大温度まで耐えられるK型熱電対がすべてそうであるわけではないことに注意する価値があります。非常に低コストのK型熱電対の多くは、絶縁体が劣化する前に500〜700℃しか扱えないかもしれません。低コストの低温K型熱電対と高コストの高温K型熱電対の実装は、基本的に同じになることが多いですが、私たちが読み取っているのは熱接合部が提供する電圧ポテンシャルであるためです。それにもかかわらず、すべての金属が同じように作られているわけではなく、より安価な熱電対は純度の低い金属を使用していたり、他の近道をしていることがあり、より高価なオプションの方が良い選択となることがあります。
記事を読む
RF PCBにおけるバランとは何か、そしてそれが必要か?
1 min
Thought Leadership
バランとは何か疑問に思っていますか?もっと詳しく知り、RF PCBレイアウトにどのように適合するかを確認してください。
記事を読む
VNA測定がPCB基板について教えてくれること
1 min
Thought Leadership
VNA測定値は、PCB基板材料の重要な特性を反映しています。ここでは、基板材料の特性がVNA測定値にどのように現れるかを説明します。
記事を読む
TRANSLATE:
DDR5 vs. DDR6: RAMモジュールで何を期待するか
1 min
Blog
PCB設計者
電気技術者
エンジニアリングスペシャリスト
デザイナーがDDR5とDDR6 RAMで何を期待できるか?次のメモリデバイスに期待できることをここで紹介します。
記事を読む
PCB損失正接について: その意味と重要性について
1 min
Thought Leadership
あなたの積層板のPCB損失正接を知っていますか?この重要な要因と信号に与える影響についてもっと学びましょう。
記事を読む
Pagination
First page
« First
Previous page
‹‹
Page
9
現在のページ
10
Page
11
Page
12
Page
13
Page
14
Next page
››
Last page
Last »