









Pi.MX8 プロジェクト - ボードレイアウト パート4

チャプター
1
2
3
4
5
6
Board Layout Part 4
| Created: July 23, 20247
PCB Assembly
| Coming SoonPi.MX8コンピュートモジュールSoMプロジェクトの新しいインストールメントへようこそ!このアップデートでは、PCB設計に最後の仕上げを行い、プロトタイプの生産準備を整えます。

前回の記事では、信号層のルーティングを完了しました。これはPi.MX8モジュールのPCBレイアウトで最も時間がかかる部分でした。しかし、同じくらい注意を要する2つのタスクがまだ残っています。電源プレーンのルーティングと信号遅延の調整です。
電源プレーン
まず、電源プレーンから始めましょう。私は通常、遅延調整を最後のステップとして行うのが好きです。なぜなら、長さ調整のために必要なメアンダーがボード上の残りのスペースをしばしば埋め尽くすからです。例えば、電源ネットをルーティングする際に追加のVIAを配置する必要がある場合(時には必要になることがあります)、必要なスペースを作るために長さ調整プリミティブを調整する必要が出てくるかもしれません。最後に長さ調整プリミティブで残りのスペースを埋めることで、追加の作業を避けることができます。

利用可能な電源プレーン層
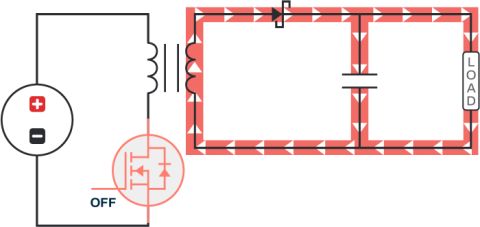
レイヤースタックを見ると、2つの専用の電源プレーン層が利用可能であることがわかります。これらの層は、薄いプリプレグによって隣接するグラウンド層から分離されています。このスタッキングは低インダクタンスプレーンの容量を増加させ、高周波でのPDNインピーダンスを減少させるのに役立ちます。
まず、高電流の電源レールを配線しましょう。この場合、これらはi.MX8 SoCとDRAMコントローラーのコアおよびメモリレール、そしてLPDDR4 ICです。

SoCのPMICコアおよびメモリ供給
VCC_ARMおよびVCC_SOCレールはリモートセンシングを使用しており、これはバックコンバーターのフィードバックノードがMIC近くの出力コンデンサにルーティングされるのではなく、i.MX8の電源パッドにルーティングされることを意味します。これは、電源プレーンまたはポリゴンを通る電圧降下を補償するためです。これらのレールの電流が比較的高く、PMICがこれらの電圧を正確に調整する必要があるため、負荷で直接「電圧を測定」することが重要です。次の図は、電源ポリゴンを通る電圧降下を示しています:

電源ポリゴンを通る電圧降下
VCC_ARMレールのパワーポリゴンは、レイヤー6にルーティングされています。ポリゴンのアウトラインに近くルーティングされたトレースは、リモートセンシング信号です。理想的には、リターンパス電流によって導入される寄生効果を補償し、フィードバックをノイズに対してより耐性を持たせるために、差動電圧を測定したいところですが、私たちの場合、これは必要ありません。参照設計の推奨に従います。

VCC_SOCポリゴン
フィードバックトレースは、SoCのピンの近くで「ネットタイ」を使用して、フィードバックネットをパワーネットに接続します。ネットタイを使用しない場合、フィードバックトレースとパワーポリゴンの間のクリーンな分離を手動で確保する必要があります。このアプローチはエラーが発生しやすいです。ネットタイは、両端に小さなパッドを持つ短いトレースセグメントからなるフットプリントです。コンポーネントタイプをネットタイに設定することで、Altium Designerはこのコンポーネントに対してショートサーキットエラーを生成しません。
VCC_ARMポリゴンとDRAMパワーレールは、レイヤー5で同様の方法でルーティングされています。

VCC_ARMが強調表示され、DRAMパワーレールが紫色で表示されています
残りの電源レールは、レイヤー5と6に分配されています。1.8Vおよび3.3Vのシステム電源ポリゴンは、これらのレールに接続されている多くのコンポーネントがボード全体に分散しているため、ボード全体にわたって広がっています。
電源プレーンのルーティングの最終ステップは、ACおよびDCのPDN分析を設定し、結果がSoCのハードウェア設計ガイドによって設定されたインピーダンス値の境界内にあるかどうかを確認することです。
ACシミュレーションには、正確な等価モデルを持つデカップリングコンデンサ、バックレギュレータの出力特性、およびレイアウトのジオメトリを含める必要があります。この記事ではシミュレーションの設定について詳しく説明しませんが、必須の検証ステップとして心に留めておく必要があります。

電源レールの目標インピーダンス
DCシミュレーションには、レイアウトのジオメトリとSoCの負荷特性のみを入力として必要とし、電源ポリゴンを通る電圧降下を計算し、過度の電流密度のエリアを強調表示します。
遅延調整
電源ネットワークのレイアウトが完了したので、やるべきリストの最後の項目である遅延調整に移ることができます。
Pi.MX8モジュールには、厳しいタイミング要件を持ち、遅延調整が必要な多くのインターフェースがあります。最も重要なインターフェースを見て、複数のコンポーネントをまたいで遅延を調整するためにX-Signalsをどのように使用できるかを見ていきましょう。
DRAMインターフェースから始めましょう。i.MX8のハードウェア設計ガイドには、遅延調整に必要なすべての情報が提供されています。トレースの調整を進める前に、パッケージ遅延が回路図ライブラリシンボルに含まれているかどうかを最初に確認する必要があります。
NXPはパッケージ遅延時間を提供しており、これは信号がi.MX8 BGAボールからシリコンチップまで移動するのにかかる時間です。インターポーザ上の異なる長さが全体の遅延時間に影響を与えるため、それらを考慮に入れることが重要です。

回路図シンボル内のピンパッケージ遅延
スキーマティックライブラリリストエディタを使用して、i.MX8ハードウェア設計ガイドドキュメントからすべてのピンパッケージ遅延を一度にスマートグリッドペーストダイアログを使用して貼り付けることができます。

SCHLIBリストツールバーを通じて表形式のピン遅延
LPDDR4インターフェースの遅延調整要件は、i.MX8ハードウェア設計ガイドで概説されています。このガイドでは、遅延の依存関係をクロック、制御/コマンド、バイトグループに分類しています。各グループのタイミングウィンドウは、クロックおよびストローブ信号に基づいて参照されます。すべての差動信号は、ペア内の補完信号間で1ps以内に一致させる必要があります。

LPDDR4-4000 PCB遅延調整要件
アドレス/コマンド/制御グループの信号は、2つのタイミング要件を満たす必要があります。1つの要件は、グループ内の各信号間の最大遅延を定義し、もう1つの要件は、クロック信号に基づいた全グループの最大遅延ウィンドウを定義します。
これが、設計ルール内で正しい信号がターゲットにされることを保証するために、複数のX信号グループを使用する理由です。

LPDDR4調整のためのX信号クラス
インターリーブされた遅延調整ルールを使用する場合、ドキュメント目的でExcelシートに総遅延値を追跡することも好みます。このステップはオプションであり、タイミング要件はすべてAltium Designerのルール設定内で定義できるため、個人の好みに依存します。

Excelでの遅延調整ドキュメント
Xシグナルクラスが定義され、設計ルールが整ったら、レイアウト内の遅延調整を開始できます。ペア内遅延調整とは別に、ほとんどの調整はアドレス/コマンド/コントロールラインに対して行う必要があります:

アドレス/コマンド/コントロールラインの遅延調整
データライン自体は、ほとんどまたは全く調整の必要がありません。トップレイヤーにルーティングされたクロック信号ペアの周りには、遅延調整に使用できる十分なスペースがあります:

トップレイヤーのクロック遅延調整
電力供給ネットワークと同様に、DRAMインターフェースに対して検証シミュレーションを実行する必要があります。特に、ルーティングの一部が比較的密接に配置されているため、クロストーク効果が見られるかどうかに興味があります。隣接するトレースまでの距離を誘電体の厚さの3倍に保つことが経験則です。ただし、この記事ではシミュレーションのセットアップや詳細については説明しません。
DRAMインターフェースの遅延調整が完了したら、Xシグナルを使用した別のアプリケーションを見てみましょう。PiMX8ボードには、外部ディスプレイを駆動できる2つのインターフェースがあります - LVDSとMIPI-DSI。
MIPI-DSIは低電圧差動信号伝送(LVDS)も使用しているため、これらのインターフェースは同じハードウェア仕様を共有しているので、マルチプレクサを使用して選択することができます。インターフェース間でマルチプレクサを使用して切り替える場合、マルチプレクサの後のルーティング(共通側)が下流のMIPI-DSIおよびLVDSインターフェースの遅延に影響を与えることを認識する必要があります。これは、MIPI-DSIインターフェースとLVDSインターフェースのために別々のX-シグナルクラスを作成することで考慮することができ、PCB上での遅延調整の自由度を高めることができます。
この例では、共通側の全てのルーティングが、ペア間およびペア対ペアの厳密な遅延ウィンドウに調整されていれば、このアプローチを避けることが可能だったかもしれません。しかし、2つの別々のX-シグナルクラスを使用することで、各インターフェースのタイミング予算をより良く制御できます。
X-シグナルを使用することで、マルチプレクサを越えてギャップを埋め、マルチプレクサの前後で各インターフェースに対して全体の信号長にわたって長さ調整を行うことができます。
同じアプローチがPCIeインターフェースにおいて、一連のAC結合キャパシタを越えるギャップを埋めるために使用されます。

マルチプレクサにルーティングされたLVDS

マルチプレクサにルーティングされたMIPI-DSI
Pi.MX8ボード上の全ての高速インターフェースは、X-シグナルを使用して遅延調整されています。これは、全体の信号のパス長をより正確に提供するためです。各インターフェースを個別に見ていくことはありません。遅延調整ルールの設定とルーティング調整は、インターフェース間でその一般的なアプローチがあまり変わらない繰り返しの作業だからです。
これは、Pi.MX8ボードのルーティングを完成させる最終ステップでした。次のステージでは、徹底的な設計ルールチェックを行い、製造データセットをエクスポートします。
次のアップデートでは、ボードを見ていき、いくつかのプロトタイプの組み立てを開始します。これがPi.MX8モジュールを初めて起動する最終ステップになるので、お楽しみに!

筆者について
関連リソース
関連する技術文書
Multidisciplinary Product Creation
- Align data and context across every discipline
- Collaborate concurrently with no silos
- Make faster decisions with shared visibility
- Stay connected through real-time updates
Learn More
Thank you, you are now subscribed to updates.